
目前适合园区场景的 AI 算法主要分四大类,核心差异在检测速度、精度、对复杂环境的鲁棒性上,需结合园区具体区域(如周界、机房、草坪)的需求来选。
一、四大类核心适用算法及场景匹配
不同算法的设计逻辑不同,对应园区的不同安防需求,没有 “最优” 只有 “最适配”。

1. 目标检测类算法(最主流)
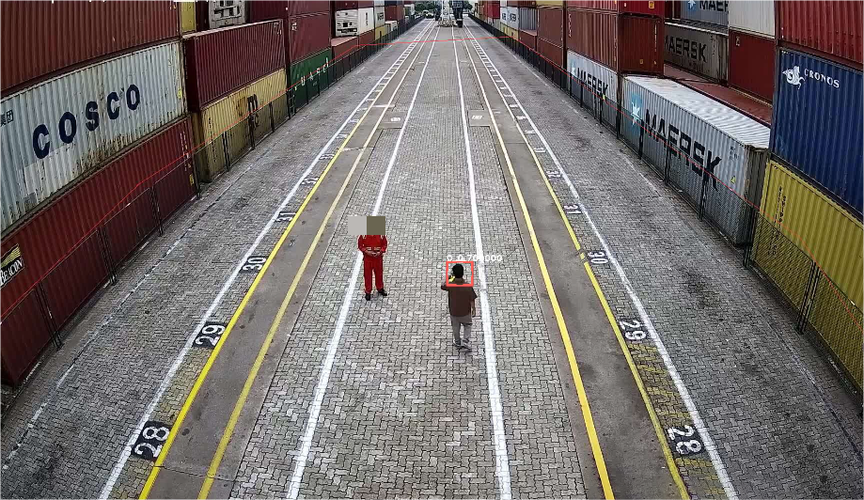
核心逻辑:先识别画面中的 “人、车” 等目标,再判断目标是否进入警戒区域,兼顾速度与精度,是园区的首选。
代表算法:
YOLO 系列(YOLOv5/YOLOv8):速度极快(单帧检测毫秒级),适合需要实时报警的场景,比如园区周界、大门入口。
Faster R-CNN:精度高于 YOLO,能更精准区分 “人” 与 “动物 / 树枝”,适合对误报敏感的区域,比如配电房、财务室。
园区适配点:支持白天 / 夜间(搭配红外摄像头)检测,能应对园区常见的 “行人低头、携带物品” 等遮挡情况。
2. 背景建模类算法(轻量基础)
核心逻辑:先学习 “无入侵时的背景”(如空荡的草坪、围墙),再检测画面中 “与背景不同的异动目标”,计算量小,适合硬件资源有限的场景。
代表算法:
MOG2(混合高斯模型):经典轻量算法,适合静态背景的区域,比如园区内的固定草坪、无人设备区。
KNN 背景建模:比 MOG2 抗光照变化更强,适合园区内 “树荫遮挡、早晚光照差异大” 的区域。
园区适配点:不需要复杂算力,普通摄像头即可运行,但对 “动态背景”(如风吹动的灌木)容易误报,需搭配 “目标过滤” 规则(如只检测大于 “1.5 米” 的目标,排除小动物)。

3. 行为分析类算法(进阶需求)
核心逻辑:不仅检测 “是否进入区域”,还能判断目标的 “异常行为”(如攀爬、徘徊、翻越),适合需要区分 “正常路过” 与 “恶意入侵” 的场景。
代表算法:
Two-Stream CNN(双流卷积):通过 “空间特征(目标位置)+ 时间特征(目标运动轨迹)” 判断行为,比如识别 “人在围墙下徘徊 5 分钟” 或 “攀爬围墙” 的动作。
3D CNN:能更精准捕捉连续动作,适合周界围墙、栏杆等需要判断 “攀爬、翻越” 的高风险区域。
园区适配点:解决 “误报” 核心痛点 —— 比如有人正常走在围墙外的道路上(未进入区域),不会触发报警;但一旦有 “伸手抓围墙” 的动作,立刻报警。
4. Transformer-based 类算法(复杂场景)
核心逻辑:通过 “注意力机制” 聚焦画面中的关键目标,即使多个目标重叠(如园区门口上下班人流),也能精准检测单个目标是否越界,适合人员密集、多目标重叠的场景。
代表算法:DETR(Detection Transformer)
园区适配点:比如园区食堂门口、上下班高峰期的大门区域,能在 “多人拥挤” 的情况下,准确识别是否有单个人员试图翻越隔离栏,避免漏检。
二、算法选型对比表(直接落地参考)
你关注的 “算法选型” 是园区入侵检测落地的关键,选对算法能直接解决误报多、漏检等核心痛点。
算法类型 | 核心优势 | 适用园区区域 | 注意事项 |
YOLO 系列 | 实时性强、速度快 | 周界围墙、大门入口、停车场 | 精度略低于 Faster R-CNN,需避免强光直射 |
Faster R-CNN | 精度高、误报少 | 配电房、财务室、危化品仓库 | 速度较慢,需搭配算力稍高的服务器 |
MOG2/KNN | 轻量、硬件要求低 | 内部草坪、无人设备区 | 对动态背景(风吹草动)敏感,需加过滤规则 |
Two-Stream CNN | 能识别异常行为(攀爬) | 周界围墙、楼顶天台 | 需连续视频帧输入,不能单帧检测 |
DETR | 多目标重叠时漏检少 | 食堂门口、上下班高峰入口 | 算力要求高,适合新建园区(有预算) |
三、选型核心建议(帮你避坑)
按 “区域等级” 选:高风险区域(如危化品仓库)优先选 “Faster R-CNN + 行为分析算法”,兼顾精度与行为判断;低风险区域(如草坪)选 “MOG2” 即可,降低成本。
按 “环境条件” 选:光照变化大(如园区西向围墙傍晚逆光)的区域,避开 MOG2,选 YOLOv8 或 DETR(抗光照鲁棒性更强)。
按 “硬件资源” 选:老旧园区若不想更换服务器,优先选 YOLOv5 或 MOG2;新建园区可直接上 DETR 或 YOLOv8,预留升级空间。
请用手机扫码查看分享内容
 需求留言:
需求留言:
领先的边缘智能产品与解决方案提供商






华北地区负责人:17340067106(毛经理)
华东地区负责人:17358670739(甘经理)
华南、华西地区负责人:19113907060(耿女士)
软件算法咨询:18982151213(刘先生)
四川省成都市武侯区天府五街花漾锦江JR大厦B座7层(总部)
 试用申请
试用申请

 硬件设备咨询
软件算法咨询
硬件设备咨询
软件算法咨询

 在线客服
在线客服

 回到顶部
回到顶部





 商城
商城


















