
一、边缘大脑:智能交通的神经中枢
车路云一体化系统中的 "边缘大脑" 是指部署在路侧的多接入边缘计算 (MEC) 设备集群,它像交通系统的 "神经末梢",承担着实时感知、协同决策与精准控制的核心功能。
核心定位:
数据枢纽:连接车端 (OBU)、路侧设备 (RSU) 与云端,实现全域数据融合;
本地决策引擎:处理 80% 实时决策任务,将响应时间从传统云端的 500ms 压缩至 50ms 内;
边缘智能载体:运行轻量化 AI 模型,执行多目标跟踪、行为预测等实时分析;

二、5 公里协同圈:全域感知的技术实现
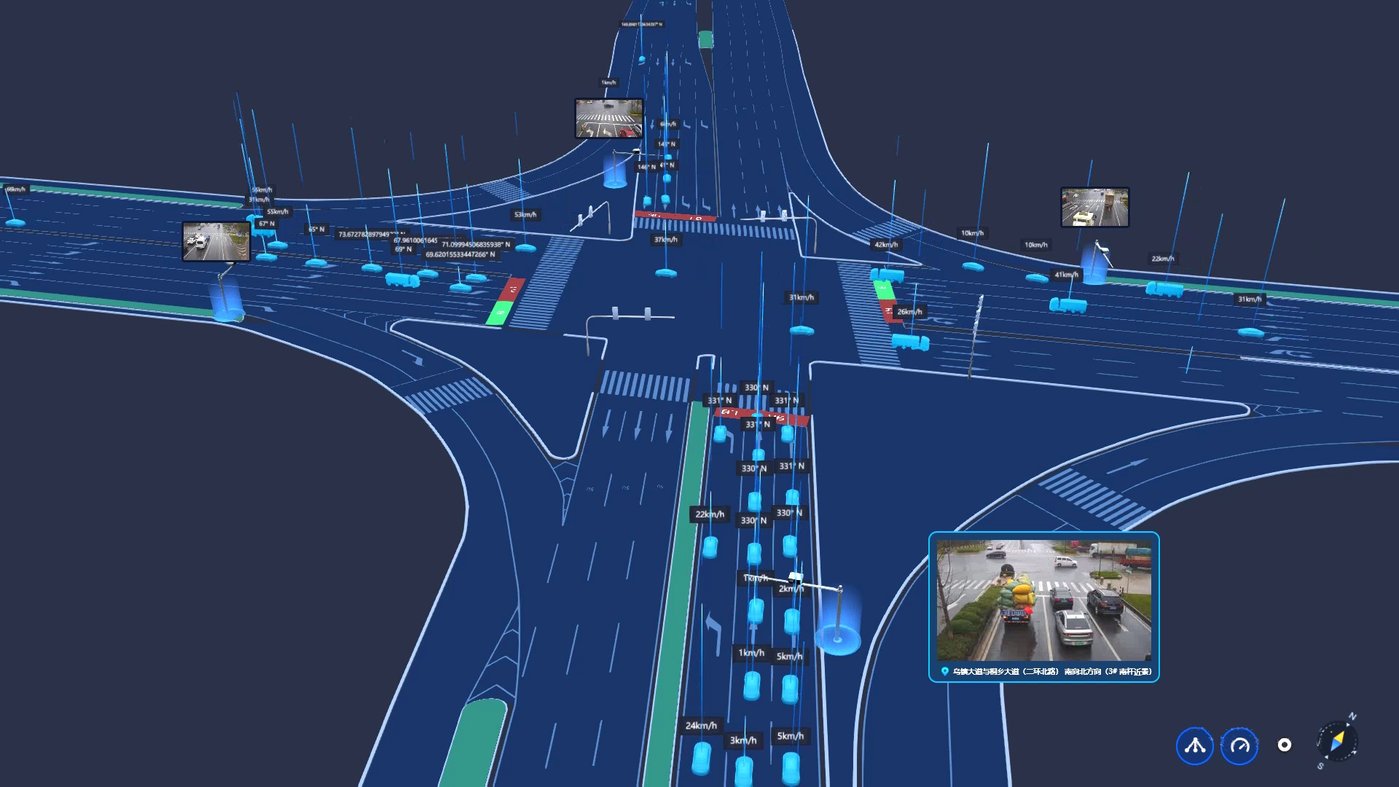
1. 感知网络架构:"千里眼" 覆盖
路侧感知矩阵:
激光雷达:高密度点云扫描,探测距离达 200m+,精度达厘米级;
高清摄像头阵列:全景视觉感知,识别交通参与者;
毫米波雷达:全天候监测,测速精度达 0.1m/s;
环境传感器:监测天气、光线等影响驾驶的因素;
部署策略:
采用 "蜂窝式 + 网格化" 混合部署,重点路口 4-8 台激光雷达 + 20 + 摄像头;
路段每隔 500-1000m 部署 RSU-MEC 一体化节点,形成 5 公里连续感知覆盖;
基于 k-means++ 算法分析历史轨迹,优化设备位置,确保无感知盲区。
2. 通信技术:"神经传导" 的高速通道
5G-V2X 融合通信:
PC5 直连:车 - 车、车 - 路直接通信,延迟 < 10ms,覆盖达 1km+;
Uu 接口:车 - 云通信,支持大带宽数据传输;
网络切片:为车路协同分配专用带宽和低延迟保障,抖动控制在 5ms 内;
通信距离突破:
C-V2X 相比传统 DSRC,通信距离提升 100%,在高速场景下仍保持稳定连接;5G-A 技术使单基站覆盖半径达 5km,构建连续的 "车联网高速公路";采用 "基站 + 分布式路侧单元" 混合组网,实现 5 公里无间断协同感知。

三、50ms 决策:极速响应的技术密码
1. 三级计算架构:分级决策的 "智能引擎"
层级 | 部署位置 | 功能定位 | 响应时间 |
边缘层 | 路口 / 路段 MEC | 实时决策、本地控制 | ≤50ms |
区域层 | 区域边缘云 | 跨路口协同、绿波控制 | 100-300ms |
中心层 | 城市云平台 | 全局优化、态势预测 | 1s-5min |
边缘计算核心优势:
将 90% 原始数据在本地处理,大幅减少云端传输延迟;异构计算架构 (GPU+FPGA+ASIC) 使推理时间 < 10ms,满足紧急制动等场景需求;边缘节点间 "边边协同",相邻节点互通状态信息,构建区域协同决策网。
2. 决策流程:毫秒级响应的闭环
感知 - 决策 - 控制全链路:
多模态数据采集(0-10ms):路侧传感器实时捕捉环境信息;
数据融合与特征提取(10-20ms):MEC 融合激光雷达、视觉等数据,生成环境表征;
AI 推理与决策生成(20-40ms):轻量化模型 (如 YOLOv5s+PointNet) 完成风险评估,生成控制指令;
指令分发与执行(40-50ms):通过 5G-PC5 直连将指令下发至车辆执行系统。
关键技术突破:
任务卸载机制:30-50% 计算量分配给车载 OBU,使 RSU 处理延迟稳定在 50ms 阈值内;
决策优先级:紧急事件 (如碰撞预警) 享有最高优先级,处理时间 < 5ms;
弹性资源调度:DRSA 算法根据交通密度自动调整计算资源,利用率达 85% 以上;
四、核心技术组件详解
1. 边缘计算节点:智能决策的 "本地大脑"
硬件架构:
采用高性能嵌入式系统(如英特尔酷睿 Ultra+OpenVINO),提供≥2TOPS 算力;配备专用 AI 加速芯片 (如昇腾、地平线),实现 < 10ms 的模型推理;内置 TSDB 时序数据库,支持毫秒级数据同步与事件追溯。
软件架构:
轻量化虚拟化层实现 CPU-NPU 资源池化,支持多任务并行处理;分布式流处理框架,实时解析多路视频与雷达数据流;边缘 - 云协同接口,支持模型更新与全局信息同步。
2. 协同决策算法:群体智慧的 "灵魂"
核心算法:
多智能体强化学习:实现车辆间协同换道决策,成功率达 98.2%;
联邦学习:在保护隐私前提下,实现路侧与车载数据共享,训练全局模型;
动态优先级调度:根据事件紧急程度分配计算资源,确保关键决策 < 50ms;
时空融合预测:结合历史数据与实时感知,预测 500m-5km 范围内交通态势;
五、实际应用场景
1. 城市交通 "绿波带" 协同
边缘大脑实时分析各路口流量,协调信号灯相位;为每辆车计算最优行驶速度,实现 "一路绿灯";决策响应时间 < 50ms,通行效率提升 20-35%。
2. 高速公路碰撞预警
路侧雷达发现前方事故 (5km 外),边缘大脑立即生成预警;通过 5G-PC5 广播至周边车辆,实现超视距预警;预警响应时间 < 30ms,制动距离缩短 40%,避免连环追尾。
3. 复杂路口自动驾驶
8 台激光雷达 + 20 台摄像头构建360° 无死角感知;边缘大脑同步处理多路数据流,识别行人、非机动车等弱势交通参与者;为自动驾驶车辆规划安全轨迹,决策时间 < 50ms,确保复杂场景安全通过。

六、技术挑战与突破
主要挑战:
计算与能耗平衡:高性能计算带来高功耗,需优化散热与能效;
多源数据融合精度:不同传感器时间戳对齐、空间坐标统一;
系统可靠性:单点故障可能影响区域协同,需冗余设计;
安全与隐私:车路数据涉及个人隐私,需加密与脱敏处理;
突破方案:
异构计算优化:专用硬件加速 + 算法轻量化,能耗降低 50% 同时保持性能;
时空校准技术:精确时间同步 (误差 < 1μs) 与空间联合标定,融合精度提升 30%;
三模冗余架构:关键节点部署备份系统,单点故障时无缝切换,可靠性达 99.999%;
安全通信协议:国密算法 (SM4) 加密 + 区块链存证,保障数据传输安全;
七、未来演进:从边缘大脑到全局智慧
随着技术发展,边缘大脑将向 "分布式智能体网络" 演进:
边缘 - 云 - 端深度协同,形成 "局部快速响应 + 全局优化" 的双层控制体系;路侧单元智能化升级,具备自学习、自优化能力,模型更新效率提升 40%;通过数字孪生技术,将物理道路 "镜像" 至虚拟空间,实现交通态势秒级预测。
总结:车路云一体化的 "边缘大脑" 通过5 公里协同感知圈和50ms 极速决策链,构建了 "感知 - 决策 - 控制" 的闭环系统,将智能驾驶从 "单车智能" 推向 "系统智能" 新高度。这一技术突破不仅提升行车安全与效率,更为未来 L4/L5 级自动驾驶规模化商用奠定了坚实基础,是智能交通领域的里程碑式创新。
请用手机扫码查看分享内容
 需求留言:
需求留言:
领先的边缘智能产品与解决方案提供商






华北地区负责人:17340067106(毛经理)
华东地区负责人:17358670739(甘经理)
华南、华西地区负责人:19113907060(耿女士)
软件算法咨询:18982151213(刘先生)
四川省成都市武侯区天府五街花漾锦江JR大厦B座7层(总部)
 试用申请
试用申请

 硬件设备咨询
软件算法咨询
硬件设备咨询
软件算法咨询

 在线客服
在线客服

 回到顶部
回到顶部





 商城
商城


















