
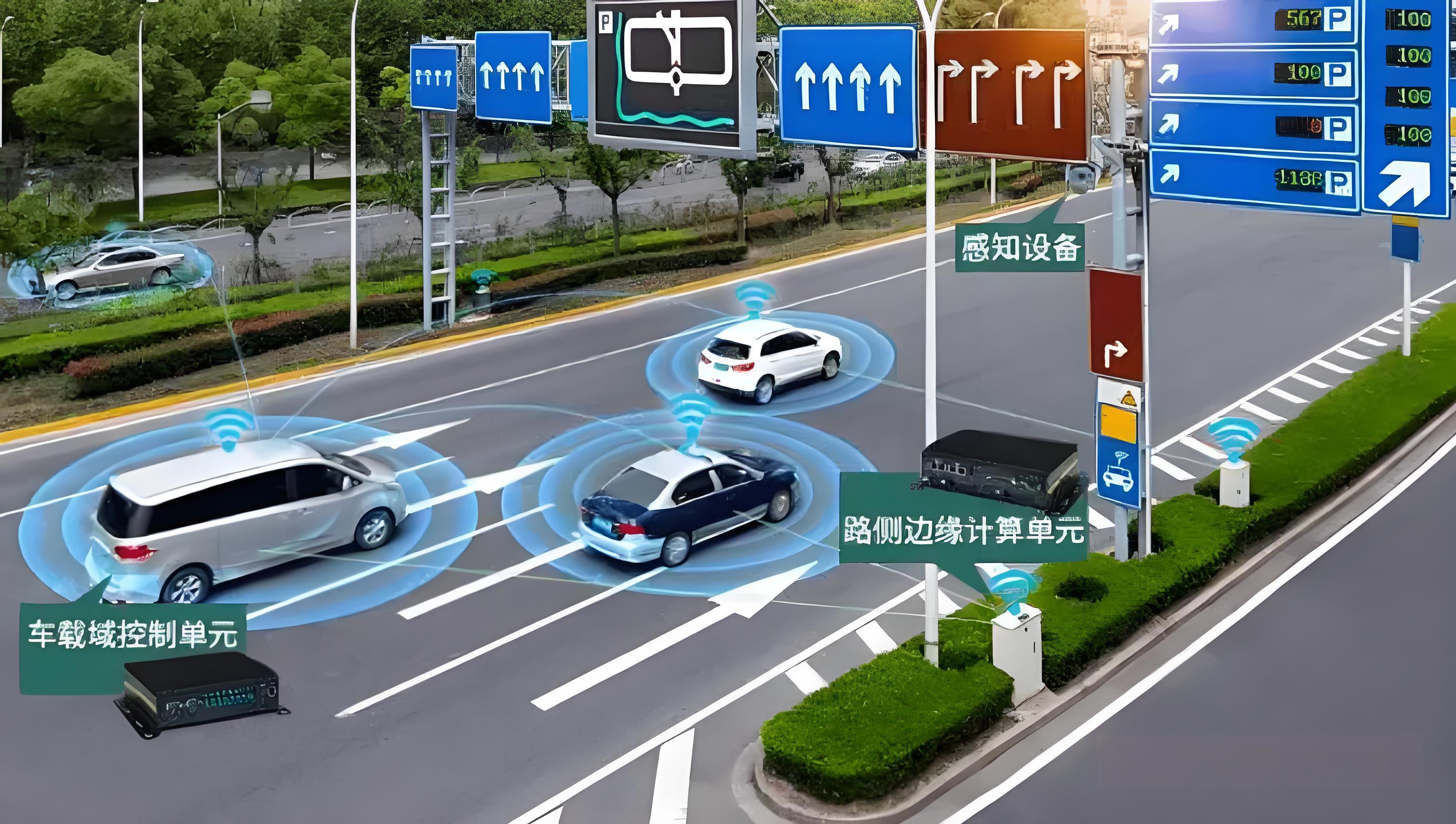
车路协同边缘计算单元(MEC)的系统接口定义是实现车路云一体化协同的核心技术基础,其设计需兼顾标准化、开放性和场景适配性。以下结合国际标准、国内规范及典型案例,从接口类型、数据交互、技术参数等维度展开说明:
一、接口分类与交互逻辑
1. MEC 与车联网平台接口(I1 接口)
根据《2024 车路协同边缘计算设施总体要求》,该接口定义了 MEC 与车联网平台的双向交互机制:
信息类型:包括设备基础信息(如 MEC 硬件配置、软件版本)、运行状态(CPU / 内存使用率、网络连接状态)、感知结果(交通参与者轨迹、事件检测数据)及 V2X 业务数据(如 RSM、SSM 消息)。
操作类型:
主动上报:MEC 在初始化、状态变更或周期性间隔(如 1 秒)时推送数据至平台。
转发:将路侧传感器原始数据(如雷达点云、视频流)或 RSU 接收的 V2X 报文(如 BSM)转发至平台。
下发指令:平台可向 MEC 下发信号灯配时、交通管控策略等指令,MEC 需在 20ms 内响应。
数据格式:采用 JSON 或 Protocol Buffer 编码,支持扩展字段以兼容新业务。
2. 北向 / 南向接口
北向接口(Northbound Interface):面向第三方应用开放,提供标准化 API 以调用 MEC 的感知数据、计算能力及 V2X 消息服务。例如,ETSI GS MEC 030 定义的 V2X 信息服务 API 支持多 MEC 节点间的信息同步,并提供预测性 QoS(p-QoS)功能,用于优化端到端通信质量。
南向接口(Southbound Interface):用于接入路侧设备,支持多协议适配:
传感器接入:摄像机采用 SDK 或 RTSP 协议,毫米波雷达通过 UDP/TCP 传输点云数据,激光雷达支持自定义协议。
交通管控设备:信号机通过专用协议(如 NTCIP)交互 SPAT(信号相位与 timing)信息,可变情报板采用 HTTP 或 MQTT 接收指令。
3. V2X 通信接口
直连通信(PC5 接口):支持 LTE-V2X 或 5G NR-V2X 的 PC5 接口,传输 BSM(基本安全消息)、MAP(地图数据)等,时延需≤30ms,可靠性≥99%。
蜂窝通信(Uu 接口):通过 5G 网络传输高清地图、视频流等大带宽数据,带宽需≥100Mbps,支持 QoS 分级保障。
二、技术参数与协议规范
1. 性能指标
时延要求:安全类应用(如碰撞预警)需≤20ms,非实时类(如路况统计)可放宽至 100ms。
带宽需求:单路视频流(1080P/25fps)需 4-8Mbps,多传感器融合数据(雷达 + 视频)需 20-50Mbps,高精度地图下载需≥100Mbps。
计算能力:基础级 MEC 需支持≥2TOPS 的 AI 算力,增强级需≥10TOPS,满足多目标跟踪、事件识别等实时处理需求。
2. 数据交互协议
消息层协议:遵循 YD/T 3709(LTE-V2X 消息层)、T/CSAE 157(应用层数据交互)等标准,消息体包含位置、速度、加速度等字段。
服务发现:采用 DNS-SD 或 MQTT 协议实现 MEC 与应用的动态注册与发现,支持多租户隔离。
安全机制:
传输加密:敏感数据(如用户身份、支付信息)采用 SM4 算法加密,通信链路通过 TLS 1.3 认证。
设备认证:RSU 与 OBU 通过国密证书(SM2/SM3)双向认证,防止伪造消息。
三、典型场景下的接口设计
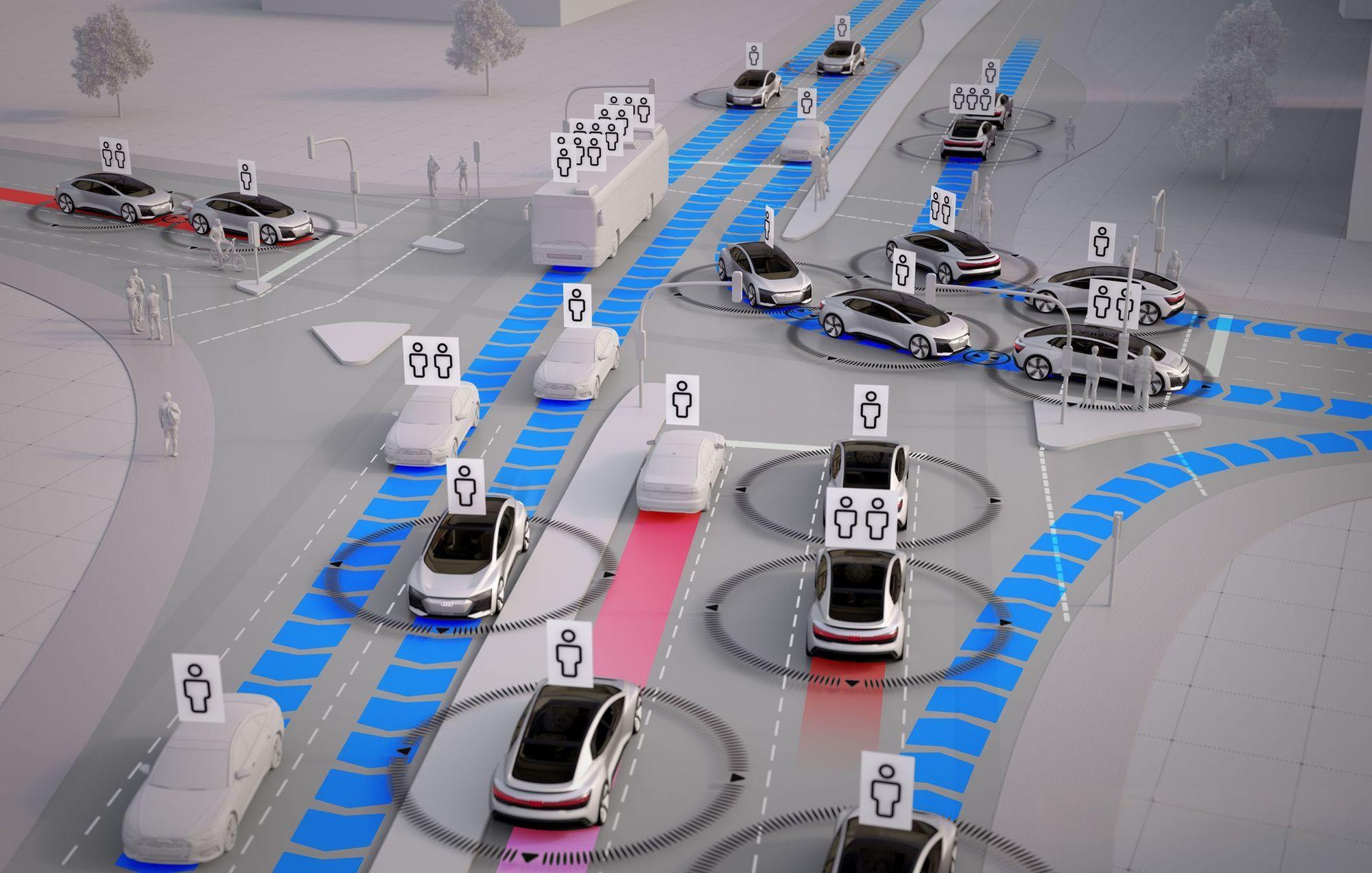
1. 智慧交叉路口
多源数据融合:MEC 通过南向接口汇聚摄像头、毫米波雷达、激光雷达数据,采用卡尔曼滤波算法实现目标轨迹融合,输出包含位置、速度、类型的结构化数据(JSON 格式),通过北向接口供自动驾驶车辆调用。
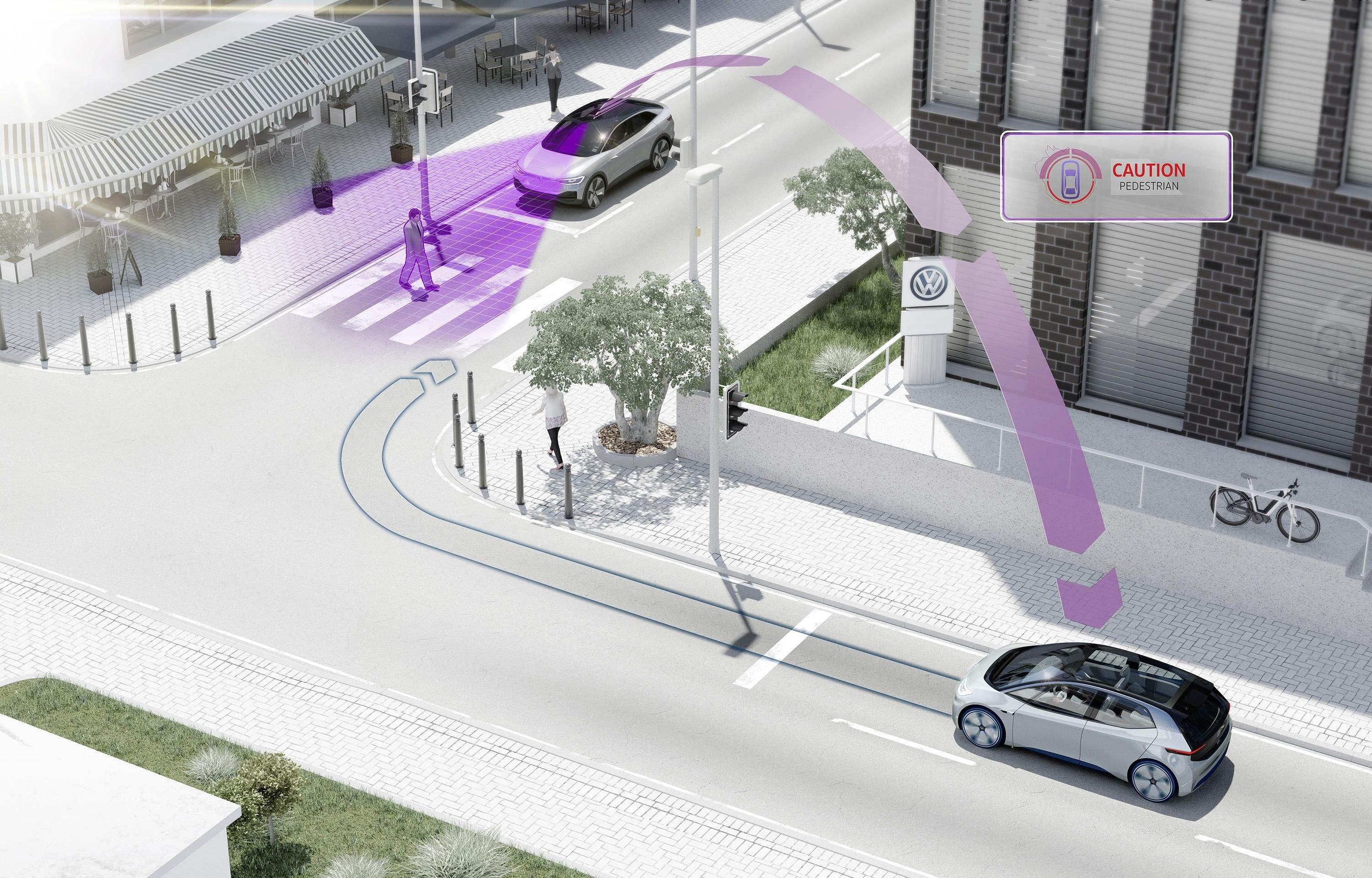
协同决策:当检测到行人横穿时,MEC 通过 PC5 接口向车辆发送预警消息(DENM),同时通过 Uu 接口将事件上报至交管平台,触发信号灯动态调整(SPAT 下发)。
2. 车路协同自动驾驶
地图数据分发:MEC 存储区域高精度地图(如 10cm 分辨率),通过 HTTP/2 协议向车辆推送 ROI(感兴趣区域)数据,更新频率≥10Hz,带宽需≥50Mbps。
远程驾驶接管:当车辆出现故障时,MEC 通过 WebSocket 接口建立与云端的低时延通道(时延≤100ms),传输车辆实时视频流和控制指令,支持远程操控。
3. 多 MEC 协同
跨域切换:车辆在不同 MEC 覆盖区移动时,通过 X2 接口(类似 LTE 基站间接口)同步上下文信息(如会话状态、QoS 策略),切换时延需≤50ms,保障服务连续性。
分布式计算:复杂任务(如大范围交通流量预测)由多个 MEC 联合处理,采用 Apache Kafka 进行数据分发,通过 gRPC 协议调用彼此的 AI 模型,计算结果通过 MQTT 广播至相关车辆。

四、标准化与开放性设计
1. 国际标准
ETSI GS MEC 030:定义 V2X 信息服务 API,支持跨厂商 MEC 间的信息共享,例如车辆轨迹数据可通过 RESTful 接口查询,订阅式服务采用 WebSocket 推送。
3GPP TS 23.288:规定 MEC 与 5G 核心网的交互流程,支持网络切片、边缘分流等功能,例如将 V2X 业务流量直接路由至本地 MEC,减少核心网负载。
2. 国内规范
C-V2X 标准:遵循 YD/T 4359-2023,MEC 需开放 GNSS 差分数据、路侧感知数据等能力,API 采用 Swagger 文档规范,支持动态加载第三方算法模块。
ETC 车路协同:基于 5.8GHz DSRC 的 MEC 需兼容 GB/T 20851 系列标准,与 OBU 通过专用短程通信协议交互,支持电子标签身份认证与交易数据加密。
3. 开放性设计
容器化部署:采用 Kubernetes 管理 MEC 应用,支持 Docker 镜像的动态编排,第三方开发者可通过开放 API 接入,例如交通优化算法可通过 Helm 图表一键部署。
协议栈扩展:提供协议插件机制,支持新增设备类型(如无人机)的接入,例如通过 ONVIF 协议适配低空感知设备,数据格式自动转换为内部统一格式。
五、挑战与未来方向
协议碎片化:不同厂商的设备接口差异较大(如华为 RSU 与中兴信号机的协议不兼容),需推动行业统一接口规范(如 SAE J2945/1)。
安全增强:需完善 V2X 消息的完整性校验机制,例如采用区块链技术实现数据溯源,防止中间人攻击。
边缘 - 云协同:研究联邦学习在 MEC 集群中的应用,实现数据不出域的模型训练,例如多路口的交通流预测模型可通过分布式训练优化。
6G 技术预研:探索太赫兹通信、智能超表面(RIS)在 MEC 中的应用,进一步降低时延(≤10ms)并提升频谱效率。
总结
车路协同 MEC 的接口定义需以标准化为基础,兼顾开放性与场景适配性。通过融合国际标准、国内规范与行业实践,可构建端到端的高效协同架构,支撑自动驾驶、智慧交通等创新应用的规模化落地。未来需持续优化协议互操作性、强化安全防护,并探索新兴技术与 MEC 的深度融合,推动车路协同向全场景、全要素的智能网联演进。
请用手机扫码查看分享内容
 需求留言:
需求留言:
领先的边缘智能产品与解决方案提供商






华北地区负责人:17340067106(毛经理)
华东地区负责人:17358670739(甘经理)
华南、华西地区负责人:19113907060(耿女士)
软件算法咨询:18982151213(刘先生)
四川省成都市武侯区天府五街花漾锦江JR大厦B座7层(总部)
 试用申请
试用申请

 硬件设备咨询
软件算法咨询
硬件设备咨询
软件算法咨询

 在线客服
在线客服

 回到顶部
回到顶部





 商城
商城


















