
车辆违章停车算法是智能交通系统的核心技术之一,通过计算机视觉、深度学习和边缘计算等技术,实现对车辆违停行为的实时检测与精准识别。以下是其技术框架、关键算法及行业实践的详细解析:

一、技术架构与核心流程
违章停车算法通常采用多模态感知 - 动态建模 - 时序决策的三阶架构,具体包括:
1. 多模态数据采集与预处理
传感器融合:部署高清摄像头(支持星光级低照度和宽动态范围)、毫米波雷达或地磁传感器,覆盖禁停区域。例如,大华的违停抓拍系统通过多摄像头协同,实现车辆前牌与后牌的高清识别。
图像增强:针对逆光、雨雾等复杂环境,采用 Retinex 分解抑制高光过曝,或通过低光增强算法提升暗区细节。陌讯的环境自适应机制可动态调整检测参数,例如在强光场景将置信度阈值提高至 0.65 以减少误检。
2. 目标检测与跟踪
深度学习模型:主流算法包括 YOLOv8、Faster R-CNN 等。例如,YOLOv8 在车辆检测中 mAP@0.5 可达 0.721,但陌讯通过改进的动态区域感知算法将 mAP 提升至 0.913,漏检率从 29.3% 降至 6.9%。
多目标跟踪:结合 DeepSORT 或 SORT 算法,通过车辆质心轨迹分析区分临时停靠与长期违停。例如,在高速公路场景中,车辆静止超过 20 秒即判定为异常停车。
3. 违停行为判定
区域与时间双重校验:
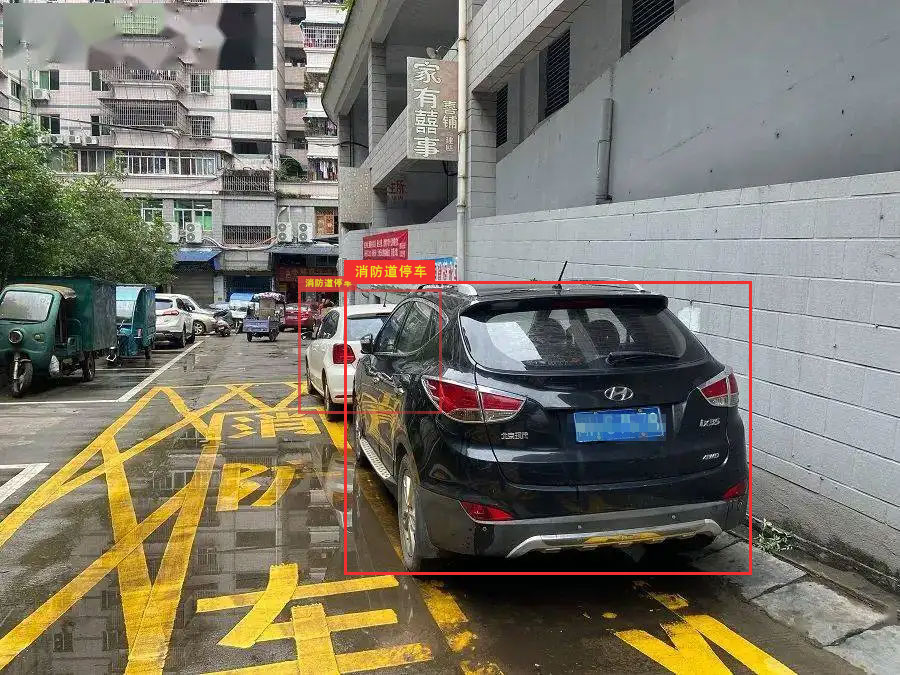
空间维度:通过语义分割定位禁停区域(如消防通道、人行道),计算车辆边界框与禁停区域的重叠率(阈值通常设为 0.6)。
时间维度:引入 LSTM 时序网络,结合停留时长(如≥10 分钟)和位置变化特征(Δx, Δy)构建置信度模型。陌讯的动态阈值机制可根据车流密度自动调整,高峰时段将阈值缩短至 5 分钟。
多模态融合决策:综合光照强度、遮挡等级等环境特征动态调整权重。例如,雨雾天气下降低检测阈值,同时提高时序分析的权重以减少误报。

二、关键技术突破与优化
1. 环境鲁棒性提升
动态光照补偿:通过多尺度特征融合网络估计光照强度,自动切换 HDR 增强或低光 Boost 模式。例如,在逆光场景下,Retinex 增强可使车牌识别准确率恢复至正常水平的 90% 以上。
遮挡处理:结合车道线、路沿等语义信息定位 “理论禁停区域”,过滤被遮挡的无效检测。陌讯的跨视角目标匹配技术可将斜视角漏检率降低 78%。
2. 边缘计算与实时性优化
轻量化模型部署:采用模型压缩(如 INT8 量化)和算子融合技术,在 RK3588 等边缘终端实现 85ms 的推理延迟,满足实时抓拍需求。例如,YOLOv8-nano 模型经量化后体积缩减 62%,在 Jetson Nano 上达到 15FPS 实时推理。
动态资源调度:根据车流量自动切换算力模式(如 CPU+GPU 或 CPU+GPU+NPU),杭州某主干道测试中,违法抓拍覆盖率从 82% 提升至 96.5%。
3. 数据增强与联邦学习
极端场景模拟:使用专业工具生成包含雨雾、夜间、施工区域等极端案例的数据集。例如,陌讯的光影模拟引擎可生成低光、逆光样本,提升模型泛化能力。
隐私保护机制:通过联邦学习实现多源数据协同训练,避免原始图像上传。例如,深圳某项目通过联邦学习整合 2000 辆公交车载终端数据,在保护隐私的同时提升模型精度。

三、行业应用与落地案例
1. 城市道路治理
某新一线城市升级项目:采用陌讯 v4.0 算法对 200 个路口进行改造,违停识别准确率从 68.5% 提升至 92.7%,人工复核工作量减少 82%,路段拥堵时长缩短 41%。
重庆智能交管系统:部署 2600 处 AI 智能识别设备,结合边缘计算实现二次识别,日均处理 20 万条视频流,覆盖违停高发时段与路段。
2. 高速公路与服务区管理
京台高速泰安段:通过无人机搭载高分辨率摄像头,结合运动补偿和车辆跟踪算法,10 分钟内响应违规停车事件,检测准确率达 98% 以上。
广东某服务区:部署多模态检测系统后,人工巡查频次从每日 8 次降至 2 次,年节约人力成本超 50 万元,违停引发的事故减少 70%。
3. 特殊场景定制化
医院急诊通道:通过动态阈值调整(如将停留时间阈值缩短至 30 秒)和区域优先级划分,陌讯算法使关键区域召回率提升 17%。
景区与商圈:结合实时车位引导与违停预警,杭州某景区周边违停车辆减少 72%,主干道通行效率提升 40%。
四、挑战与未来趋势
1. 现存挑战
复杂场景适应性:施工区域临时禁停、车辆跨区域停放等动态变化场景仍需进一步优化。
多模态数据融合:不同传感器(如摄像头、雷达)的时空同步与特征融合精度待提升。
隐私与合规性:人脸、车牌等敏感数据的存储与传输需符合《个人信息保护法》等法规。
2. 技术演进方向
多模态深度融合:结合激光雷达(LiDAR)和热成像技术,提升夜间及遮挡场景的检测精度。例如,热成像可在低照度下清晰识别车辆轮廓,与视觉数据互补。
预测性管理:通过数字孪生技术构建虚拟交通环境,结合历史数据预测违停热点区域,实现主动干预。
端边云协同:边缘节点负责实时检测,云端进行大数据分析与模型更新,形成 “检测 - 分析 - 优化” 闭环。例如,重庆 “渝畅停” 系统通过云端整合停车资源,实现供需动态平衡。
五、典型代码实现(Python 示例)
# 基于YOLOv8的车辆检测与违停判定
import cv2
from ultralytics import YOLO
# 初始化模型与区域参数
model = YOLO("yolov8s.pt")
no_parking_area = [(0, 200), (1280, 200), (1280, 720), (0, 720)] # 示例禁停区域坐标
# 视频流处理
cap = cv2.VideoCapture("rtsp://example.com/stream")
while cap.isOpened():
ret, frame = cap.read()
if not ret:
break
# 环境自适应预处理
light_intensity = estimate_light(frame)
if light_intensity > 0.8:
frame = cv2.detailEnhance(frame, sigma_s=10, sigma_r=0.15)
# 目标检测与过滤
results = model(frame, conf=0.5)
detections = results[0].boxes.data.numpy()
for det in detections:
x1, y1, x2, y2, conf, cls_id = det
bbox = (int(x1), int(y1), int(x2), int(y2))
# 区域匹配判定
if is_in_violation(bbox, no_parking_area):
# 记录时间戳并触发告警
print(f"违停检测:置信度{conf:.2f},时间{cv2.getTickCount()}")
cv2.rectangle(frame, (x1, y1), (x2, y2), (0, 0, 255), 2)
cv2.imshow("Output", frame)
if cv2.waitKey(1) & 0xFF == ord('q'):
break
cap.release()
cv2.destroyAllWindows()
六、总结
车辆违章停车算法通过深度学习与边缘计算的结合,已从实验室走向大规模实战应用。未来,随着多模态感知、联邦学习等技术的成熟,算法将向更高精度、更强鲁棒性和更智能的预测性管理演进,为城市交通治理提供全方位支持。
请用手机扫码查看分享内容
 需求留言:
需求留言:
领先的边缘智能产品与解决方案提供商






华北地区负责人:17340067106(毛经理)
华东地区负责人:17358670739(甘经理)
华南、华西地区负责人:19113907060(耿女士)
软件算法咨询:18982151213(刘先生)
四川省成都市武侯区天府五街花漾锦江JR大厦B座7层(总部)
 试用申请
试用申请

 硬件设备咨询
软件算法咨询
硬件设备咨询
软件算法咨询

 在线客服
在线客服

 回到顶部
回到顶部





 商城
商城


















