
车辆逆行算法与 AI 边缘计算盒子结合,核心是通过边缘端本地化算力实现对车辆逆行行为的实时检测、识别与预警,无需依赖云端大规模算力,降低延迟并提升场景适应性。
这个组合方案在智慧交通、园区管理等领域应用广泛,其技术逻辑和落地价值可以从以下几个方面拆解。

1. 核心技术构成:算法与硬件的协同
车辆逆行检测的实现,依赖算法与边缘盒子的深度适配,两者需满足以下关键要求。
(1)车辆逆行算法:三大核心步骤
算法是实现检测的 “大脑”,通常基于计算机视觉技术,流程分为三步:
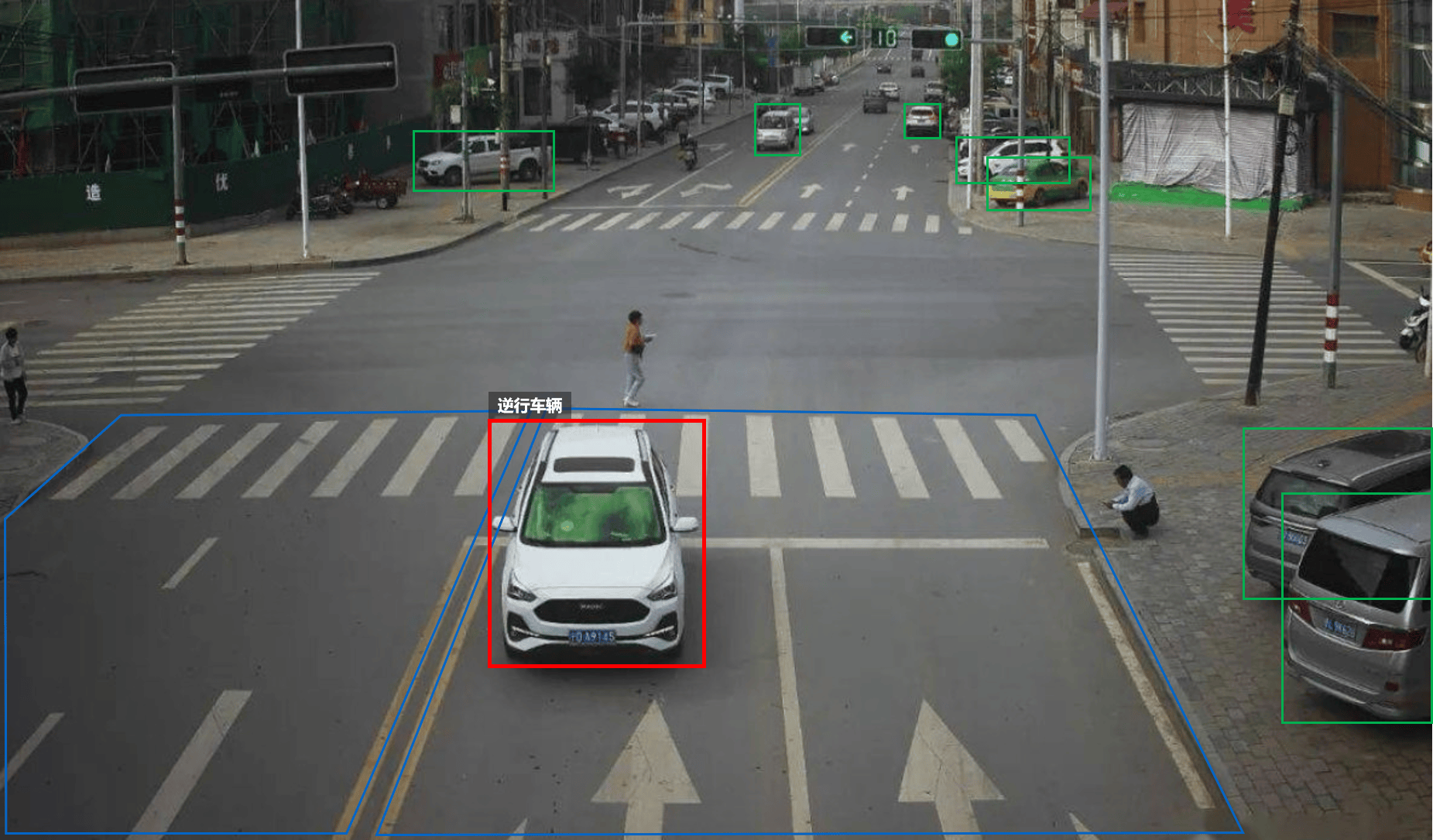
目标检测:通过深度学习模型(如 YOLO、SSD)从摄像头画面中识别车辆,输出车辆的位置、类型(如轿车、货车)等信息。
轨迹追踪:对连续帧中的车辆进行关联,形成单个车辆的运动轨迹,避免因车辆遮挡、短暂消失导致的误判。
逆行判定:结合预设的车道方向(如通过车道线检测、电子围栏划定),判断车辆运动轨迹是否与规定方向相反,若相反则触发逆行警报。
(2)AI 边缘计算盒子:硬件基础要求
边缘盒子是算法运行的 “载体”,需满足本地化算力、低延迟、高可靠性的需求,关键参数包括:
算力支持:需具备足够的 AI 算力(通常以 TOPS 为单位),支持算法模型的实时推理,一般要求不低于 2TOPS(针对轻量级模型)。
接口适配:提供丰富的接口,如 HDMI/CSI(连接摄像头)、网口(数据上传)、IO 口(控制报警设备),满足多设备接入需求。
环境适应性:支持宽温(-30℃~70℃)、防尘防水(IP65 及以上),适应户外路口、隧道等复杂场景。
低延迟:端到端延迟(从图像采集到警报输出)需控制在 100ms 以内,确保预警的时效性。
2. 核心优势:为何选择 “算法 + 边缘盒子” 组合
相比传统的 “摄像头 + 云端计算” 模式,该组合的核心优势集中在实时性、可靠性、成本三个维度:
低延迟:数据在边缘端本地处理,无需上传云端,避免网络传输延迟,尤其适合需要实时干预的场景(如路口逆行预警)。
高可靠:不依赖网络稳定性,即使断网也能本地完成检测和报警,避免云端故障导致的系统瘫痪。
低成本:减少大量视频数据的上传带宽成本,同时边缘盒子的硬件成本远低于云端大规模算力集群。
3. 典型应用场景
该方案已广泛应用于需要管控车辆行驶方向的场景,主要包括:
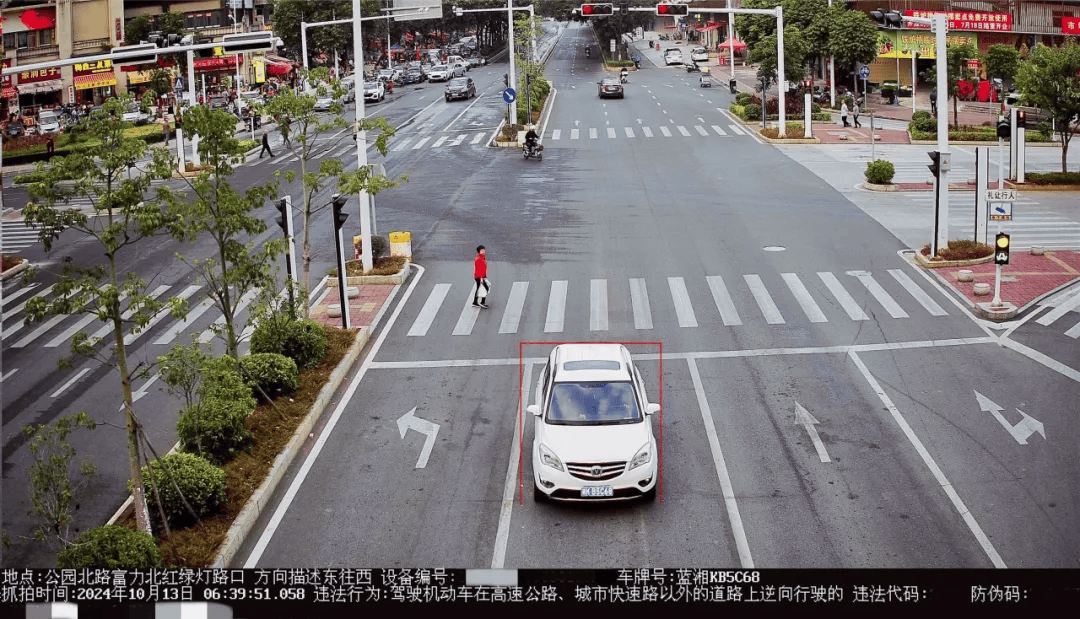
城市交通执法:在单行道、禁止掉头路口部署,自动抓拍逆行车辆,生成违章证据(图片 + 视频),无需人工监控。
园区 / 厂区管理:在园区内部道路、厂区货运通道划定单向路线,防止车辆逆行引发碰撞,保障人员安全。
高速公路 / 隧道:在隧道入口、应急车道部署,检测逆行车辆并立即触发声光报警,提醒驾驶员和管控中心。
4. 落地关键注意事项
要确保方案有效运行,需关注两个核心问题:
算法适配性:边缘盒子的算力有限,需将算法模型轻量化(如使用 TensorRT 量化、模型剪枝),在精度和速度间平衡。
场景标定:需根据具体场景(如车道宽度、光照条件)调整算法参数(如检测阈值、轨迹判定距离),避免强光、暴雨等环境导致误判
请用手机扫码查看分享内容
 需求留言:
需求留言:
领先的边缘智能产品与解决方案提供商






华北地区负责人:17340067106(毛经理)
华东地区负责人:17358670739(甘经理)
华南、华西地区负责人:19113907060(耿女士)
软件算法咨询:18982151213(刘先生)
四川省成都市武侯区天府五街花漾锦江JR大厦B座7层(总部)
 试用申请
试用申请

 硬件设备咨询
软件算法咨询
硬件设备咨询
软件算法咨询

 在线客服
在线客服

 回到顶部
回到顶部





 商城
商城


















