
中小型工地低成本裸土识别可采用 “轻量化多特征融合算法 + 边缘计算 + 多设备协同采集” 方案,以≤3000 元 / 节点的硬件成本实现 90% 以上识别准确率,兼顾全覆盖与经济性。
一、技术选型:低成本与高精度的平衡
1. 核心算法选型
优先采用多特征融合轻量化算法,基于 MobileNetV3 改进骨干网络,融合颜色(HSV+LAB)、纹理(LBP+GLCM)及几何特征,解决光照变化、小目标漏检问题。
模型优化:通过 INT8 量化 + 30% 稀疏度剪枝,体积减少 72%,推理速度提升 40%,精度损失仅 1.2%。
开源替代方案:基于 TensorFlow Lite Micro 部署简化版 YOLOv8-nano,搭配 LoveDA 开源数据集(5987 张高分辨率影像)进行迁移学习,降低标注成本。
2. 数据采集技术选型
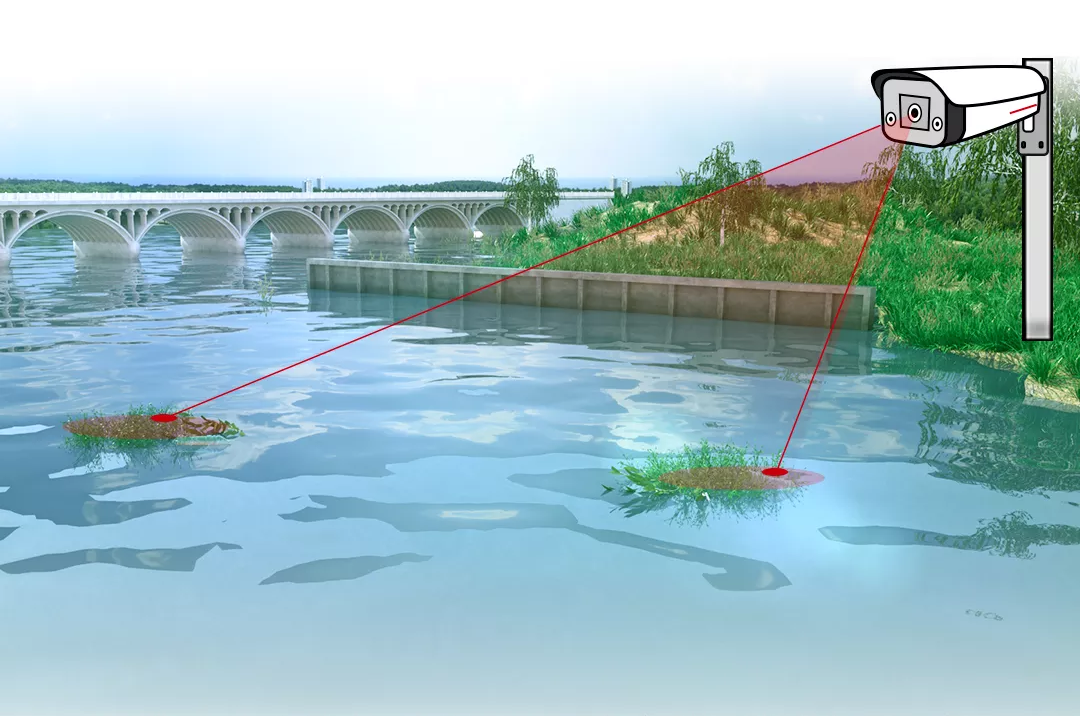
固定采集:选用 1200 万像素智能相机,支持 4K 视频拍摄,配置 LED 补光灯应对逆光场景。
移动巡检:采用多旋翼无人机,续航≥30 分钟,垂直重叠率≥80%,实现工地全景覆盖。
协同策略:固定相机覆盖重点区域(材料堆放区、施工面),无人机每日 1-2 次全区域巡检,无死角覆盖。
3. 硬件选型(单节点成本控制)
边缘计算设备:RK3588 NPU 智能相机(支持本地推理)或树莓派 4B+USB 摄像头,成本≤1500 元。
辅助设备:50cm 比例尺(用于土堆面积估算)、防水防尘外壳(适应工地环境),成本≤500 元。
存储传输:双 SD 卡冗余存储(≥256GB)+ LoRa 低功耗传输,避免云端存储费用。
二、部署方案:边缘优先 + 极简运维
1. 部署架构:边缘计算 + 云端协同
边缘层:设备本地运行量化后的模型,实时处理视频流(推理速度≤32ms / 帧),仅上传识别结果(裸土区域坐标、面积)。
云端层:通过 WebVM 构建轻量化管理平台,实现设备监控、数据统计与模型增量训练,无需专用服务器。
部署命令:采用 Docker 容器化部署,简化操作:docker run -it soil-detect:light --device /dev/video0 --threshold 0.7。
2. 全覆盖部署策略
点位规划:按每 500㎡1 个固定相机的密度布置,优先安装在高处(塔吊、围挡顶部),减少遮挡。
无人机航线:采用网格状航线,航高 30-50 米,条带间距≤30 米,避开建筑物障碍。
数据同步:每日自动汇总边缘设备与无人机数据,生成工地裸土覆盖热力图,标记未覆盖区域。
3. 环境适配与优化
数据增强:通过工具生成光照扰动、遮挡模拟、尺度变化样本,提升阴雨天、逆光场景鲁棒性。
动态阈值:根据环境传感器数据(光照、湿度)自动调整识别阈值,逆光场景准确率≥89%。
增量训练:每月用新采集的工地数据进行模型微调,持续降低漏检率(目标≤5%)。
三、实施建议:低成本落地关键步骤
试点先行:选择 1 个典型中小型工地(≤1 万㎡)部署 3-5 个边缘节点,验证识别精度与覆盖效果后再推广。
人员培训:仅需 1 名技术人员负责设备安装与平台管理,通过 WebVM 统一界面操作,无需专业运维知识。
成本控制:优先复用工地现有摄像头、无人机设备,仅新增边缘计算模块,单工地总投入可控制在 1-3 万元。
请用手机扫码查看分享内容
 需求留言:
需求留言:
领先的边缘智能产品与解决方案提供商






华北地区负责人:17340067106(毛经理)
华东地区负责人:17358670739(甘经理)
华南、华西地区负责人:19113907060(耿女士)
软件算法咨询:18982151213(刘先生)
四川省成都市武侯区天府五街花漾锦江JR大厦B座7层(总部)
 试用申请
试用申请

 硬件设备咨询
软件算法咨询
硬件设备咨询
软件算法咨询

 在线客服
在线客服

 回到顶部
回到顶部





 商城
商城


















