
交通拥堵事件检测算法的核心目标是实时或准实时识别路网中因交通事故、车辆故障、车流饱和等原因导致的交通流异常(拥堵),为交通管控(如信号配时优化、应急疏导)和出行服务(如路径推荐)提供决策依据。其性能直接依赖于输入数据类型和算法对交通流时空关联性的建模能力,目前已形成多技术路径并存的研究与应用体系。
一、核心输入数据类型
算法的设计首先依赖于数据来源,不同数据的特性(如采样频率、覆盖范围、精度)决定了检测思路的差异。主流输入数据分为三类:
数据类型 | 典型来源 | 核心参数 | 特点 |
固定传感器数据 | 路面感应线圈、微波雷达、超声波探测器 | 流量(单位时间车辆数)、速度、占有率(车辆占车道时间比) | 精度高、实时性强,但覆盖范围有限、维护成本高 |
浮动车数据 | 出租车、网约车、私家车 GPS / 北斗 | 瞬时速度、位置、行驶方向 | 覆盖范围广、成本低,但数据稀疏(依赖车辆密度)、存在定位误差 |
视频数据 | 道路监控摄像头 | 车辆数量、行驶轨迹、车辆间距 | 直观、可追溯,但受光照 / 天气 / 遮挡影响大、算力需求高 |
二、主流交通拥堵事件检测算法分类及详解
根据技术原理,算法可分为传统统计与机器学习、深度学习、计算机视觉、多源数据融合四大类,各类算法在实时性、鲁棒性、适用场景上差异显著。
2.1 传统统计与机器学习方法(2010 年前主流)
这类算法基于交通流的统计规律或手工设计特征,建模简单、算力需求低,适用于数据量小、场景简单的路网(如郊区道路、单一路段)。
1. 阈值法(Threshold-Based Method)
原理:基于交通流理论中 “拥堵与正常状态的参数临界值”—— 当检测到的速度低于阈值(如城市主干道 < 20km/h)、密度高于阈值(如 > 25 辆 /km)或流量骤降 30% 以上时,判定为拥堵。
优点:实现简单(仅需设定阈值)、实时性极强(毫秒级响应)、无训练成本。
缺点:鲁棒性差(阈值需人工调整,无法适应高峰 / 平峰、雨雪天等场景变化)、易误检(如临时减速导致的速度波动)。
适用场景:单一车道、交通流稳定的路段(如高速路应急车道检测)。

2. 卡尔曼滤波与扩展卡尔曼滤波(KF/EKF)
原理:将交通流视为 “动态系统”,通过预测 - 更新循环估计交通流真实状态(如真实速度),当 “观测值(传感器数据)与预测值的偏差超过阈值” 时,判定为拥堵(偏差由拥堵导致)。
优点:能过滤传感器噪声(如线圈数据波动)、提升数据可靠性。
缺点:仅适用于线性或弱非线性系统(交通流拥堵时呈强非线性)、对初始参数敏感。
适用场景:传感器噪声大但交通流波动小的路段。
3. 经典机器学习模型
基于 “手工提取特征 + 分类器” 的思路,核心是通过数据驱动学习 “正常 / 拥堵” 的特征差异。
常用模型:支持向量机(SVM)、随机森林(RF)、逻辑回归(LR)、孤立森林(异常检测专用)。
特征输入:历史同期速度、速度方差、流量变化率、上下游路段参数差值等。
优点:相比阈值法鲁棒性更强(能学习多特征关联)、可处理一定非线性场景。
缺点:依赖人工特征设计(特征质量决定性能)、难以捕捉交通流的长时序依赖(如早高峰拥堵的逐步蔓延)。
适用场景:数据量中等、路网结构简单的区域(如城市次干道)。
4. 交通流理论衍生方法(如冲击波理论)
原理:基于 “交通流三参数(流量 q - 速度 v - 密度 k)关系模型”,当车流从 “自由流”(高 v、低 k)转为 “拥堵流”(低 v、高 k)时,会产生 “拥堵冲击波”(拥堵区域向上下游传播的波前),通过检测冲击波的出现和传播速度判定拥堵。
优点:能解释拥堵的物理成因、可预测拥堵蔓延范围。
缺点:假设路网均匀(实际路网有路口、匝道干扰)、对数据采样频率要求高(需每秒级数据)。
适用场景:高速路、城市快速路等连续流路段。

2.2 深度学习方法(2015 年后主流)
深度学习通过自动提取高维时空特征,解决了传统方法 “手工特征依赖” 和 “非线性建模能力弱” 的问题,尤其擅长处理大规模、强时空关联的交通流数据(如城市路网)。
1. 时序建模模型:LSTM/GRU(长短期记忆网络 / 门控循环单元)
核心优势:捕捉交通流的时间依赖性(如当前拥堵与 10 分钟前车流增长的关联、早高峰的周期性)。
原理:通过 “门控机制”(输入门、遗忘门、输出门)记忆长时序信息,避免传统 RNN 的 “梯度消失” 问题,将历史交通流参数(如过去 30 分钟的速度序列)作为输入,输出 “是否拥堵” 的分类结果。
变种:双向 LSTM(Bi-LSTM)—— 同时利用 “过去→现在” 和 “现在→未来” 的时序信息,提升检测准确性。
优点:时序建模能力强、适合处理浮动车或固定传感器的连续时序数据。
缺点:难以捕捉路网的空间关联(如 A 路口拥堵对 B 路口的影响)、训练数据量需求大。
适用场景:单一路段的长期拥堵趋势检测(如主干道早高峰拥堵预警)。
2. 空间建模模型:CNN/GNN(卷积神经网络 / 图神经网络)
CNN(卷积神经网络):
原理:将路网划分为 “网格单元”(如 100m×100m),把交通流参数(速度、密度)视为 “图像像素”,通过卷积核提取局部空间特征(如某网格的拥堵对周边 3 个网格的影响)。
优点:擅长处理网格化的空间数据、计算效率高。
缺点:假设路网是规则网格(实际路网是不规则拓扑结构,如十字路口、匝道),空间关联性建模不精准。
GNN(图神经网络):
原理:将路网抽象为 “图结构”(节点 = 路口 / 路段,边 = 节点间的连通关系),通过 “图卷积层” 学习节点间的空间依赖(如上下游路段的车流传递),结合交通流数据实现拥堵检测。
变种:GAT(图注意力网络)—— 通过 “注意力权重” 动态调整不同节点的影响程度(如拥堵时上游节点对下游的影响权重更高)。
优点:完美匹配路网拓扑结构、空间关联性建模精准。
缺点:图结构构建复杂(需融合路网拓扑数据)、算力需求高于 CNN。
适用场景:区域路网(如城市核心区)的拥堵检测与蔓延预测。

3. 时空融合模型(当前最优方向)
原理:结合 “时序模型(LSTM/GRU)” 和 “空间模型(CNN/GNN)”,同时捕捉交通流的时间连续性和空间关联性。
典型架构:
CNN-LSTM:先用 CNN 提取路网空间特征,再用 LSTM 处理时序特征。
GNN-LSTM:用 GNN 建模路网拓扑关联,用 LSTM 建模时序变化,适用于复杂路网。
Transformer(注意力机制):通过 “时空注意力层” 同时聚焦 “关键时间步”(如拥堵发生前 5 分钟)和 “关键路段”(如拥堵源头路段),建模能力更强但算力需求极高。
优点:综合时空特征,检测准确率和鲁棒性最优。
缺点:训练复杂度高、需大规模标注数据(正常 / 拥堵标签)、实时性依赖硬件算力(需 GPU/TPU 支持)。
适用场景:城市核心区、高速路路网等大规模复杂场景(如北京三环内拥堵检测)。
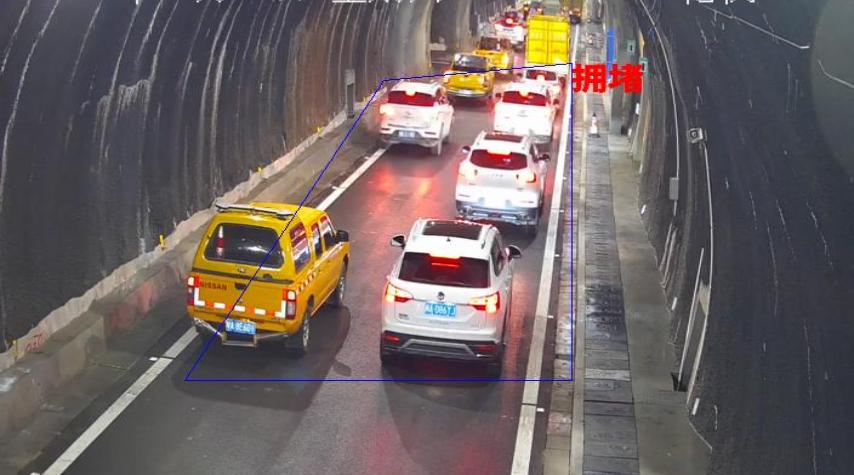
2.3 计算机视觉方法(基于视频数据)
这类算法直接从监控视频中提取车辆信息,无需依赖专用传感器,适用于已部署摄像头但缺乏固定传感器的路段(如老城区道路)。
1. 背景差分法(Background Subtraction)
原理:先构建 “无车背景模型”(如均值法、混合高斯模型),再将实时帧与背景帧对比,通过 “前景区域(车辆)的面积占比” 或 “前景区域移动速度” 判定拥堵(面积占比 > 60% 或速度 < 15km/h)。
优点:计算简单、实时性强(可在 CPU 上运行)。
缺点:对光照变化(如阴天转晴天)、阴影、遮挡(车辆重叠)敏感,易误检。
2. 光流法(Optical Flow)
原理:计算视频中 “像素点的运动向量”(光流),通过光流的 “平均速度” 和 “方向一致性” 判断拥堵 —— 当平均速度低于阈值且方向混乱(车辆停滞或缓慢移动)时,判定为拥堵。
优点:无需背景建模,能处理轻微遮挡。
缺点:算力需求高于背景差分法、对快速移动的车辆(如自由流)检测准确,但对低速拥堵车辆的光流计算易受噪声干扰。
3. 基于目标检测 / 分割的方法(深度学习驱动)
原理:先用目标检测模型(如 YOLO、Faster R-CNN)检测视频中的车辆,或用语义分割模型(如 U-Net)分割 “车辆区域”,再统计 “单位时间内通过的车辆数(流量)”、“车辆间距”、“平均速度”,结合这些参数判定拥堵。
优点:能直接获取车辆级信息(如车型、数量),鲁棒性远高于传统视觉方法(可通过数据增强应对光照 / 天气变化)。
缺点:算力需求高(需 GPU 支持实时检测)、对密集拥堵(车辆完全重叠)的计数准确率下降。
适用场景:摄像头视角固定、车辆密度中等的路段(如城市支路)。
2.4 多源数据融合方法(综合性能最优)
单一数据存在局限性(如浮动车数据稀疏、视频受天气影响),多源融合通过 “互补数据优势” 提升检测可靠性,是未来的核心发展方向。
融合层级(从低到高)
数据层融合:直接对原始数据进行整合(如用卡尔曼滤波融合 “浮动车速度” 和 “线圈速度”,修正定位误差)。
特征层融合:对不同数据提取的特征进行拼接(如将 “视频提取的车辆密度特征” 与 “线圈提取的流量特征” 输入深度学习模型)。
决策层融合:对不同算法的检测结果进行投票或加权(如 “LSTM 基于浮动车的检测结果”+“YOLO 基于视频的检测结果”,权重由历史准确率决定)。
典型应用
城市路网:融合 “浮动车 GPS 数据(覆盖广)”+“固定线圈数据(精度高)”+“监控视频(直观验证)”,实现全天候、高准确率的拥堵检测。
高速路:融合 “微波雷达数据(抗天气干扰)”+“视频数据(事件验证,如事故导致拥堵)”,减少恶劣天气下的误检。

三、算法评价核心指标
不同场景对指标的优先级不同(如高速路需低延迟,城市路网需高准确率),核心评价指标包括:
指标 | 定义 | 优先级场景 |
准确率(Precision) | 检测为 “拥堵” 的事件中,真实拥堵的比例(减少误检) | 交通管控(避免无效疏导) |
召回率(Recall) | 真实拥堵事件中,被成功检测的比例(减少漏检) | 应急救援(避免遗漏事故) |
F1 值 | 准确率与召回率的调和平均(平衡两者) | 通用场景 |
检测延迟(Latency) | 拥堵发生到算法识别的时间差(毫秒级 / 秒级) | 高速路、主干道实时管控 |
鲁棒性(Robustness) | 算法在雨雪、遮挡、传感器故障等异常场景下的性能稳定性 | 全天候运营路网 |
四、关键挑战
实时性与准确率的平衡:深度学习模型准确率高,但需 GPU 支持,难以在边缘设备(如路侧单元 RSU)实时部署。
复杂场景干扰:雨雪、大雾导致视频 / 传感器数据噪声;车辆遮挡、行人横穿导致交通流参数计算偏差。
路网拓扑动态变化:临时施工、道路管制改变路网结构,算法泛化能力不足。
数据稀疏性:郊区或夜间浮动车数量少,数据稀疏导致检测准确率下降。

五、未来发展趋势
边缘智能部署:将轻量化深度学习模型(如 MobileNet-LSTM)部署到路侧单元(RSU),减少数据传输延迟,实现 “车 - 路 - 云” 协同检测。
多模态大模型融合:结合文本数据(如交通广播、社交媒体拥堵爆料)、图像、传感器数据,提升复杂场景鲁棒性。
数字孪生联动:在数字孪生路网中模拟拥堵传播,通过 “虚拟 - 现实” 交互优化检测算法参数。
自监督 / 半监督学习:减少对人工标注数据的依赖(如用自监督学习从无标签数据中提取特征),降低算法落地成本。
综上,交通拥堵事件检测算法已从 “单一数据、简单统计” 向 “多源融合、深度时空建模” 演进,未来需在 “实时性、鲁棒性、低成本” 三大方向持续突破,以适应智慧交通的大规模落地需求。
请用手机扫码查看分享内容
 需求留言:
需求留言:
领先的边缘智能产品与解决方案提供商






华北地区负责人:17340067106(毛经理)
华东地区负责人:17358670739(甘经理)
华南、华西地区负责人:19113907060(耿女士)
软件算法咨询:18982151213(刘先生)
四川省成都市武侯区天府五街花漾锦江JR大厦B座7层(总部)
 试用申请
试用申请

 硬件设备咨询
软件算法咨询
硬件设备咨询
软件算法咨询

 在线客服
在线客服

 回到顶部
回到顶部





 商城
商城


















