
无人机图像识别算法与地面算法的核心差异,本质是由 “空中动态场景” 和 “地面稳定场景” 的硬件约束、数据特性完全不同所决定的。
两者的差异主要体现在硬件适配、数据特性、实时性要求三个核心维度,具体区别如下:

1. 硬件约束:“轻量化” vs “高性能”
这是最根本的差异,直接决定了算法设计的方向。
无人机算法:必须适配无人机的嵌入式硬件(如边缘计算模块、机载处理器)。
算力有限:无法运行复杂的大模型(如千亿参数的视觉模型),需用 MobileNet、YOLOv8-nano 等轻量化网络。
功耗敏感:算法需控制能耗,避免续航大幅缩短,通常会简化计算步骤(如减少特征图通道数)。
内存有限:无法缓存大量中间数据,需优化数据读写逻辑,降低内存占用。
地面算法:多运行在服务器、PC 等高性能硬件上。
算力充足:可使用 ResNet、ViT 等大模型,追求更高识别精度,无需过度考虑轻量化。
功耗无约束:服务器可长时间高负载运行,算法设计以精度优先,无需妥协能耗。
内存充裕:可缓存多帧图像、复杂特征,支持更复杂的后处理(如多帧融合、轨迹预测)。
2. 数据特性:“动态不稳定” vs “静态规整”
无人机的飞行状态直接导致图像数据质量与地面数据差异巨大。
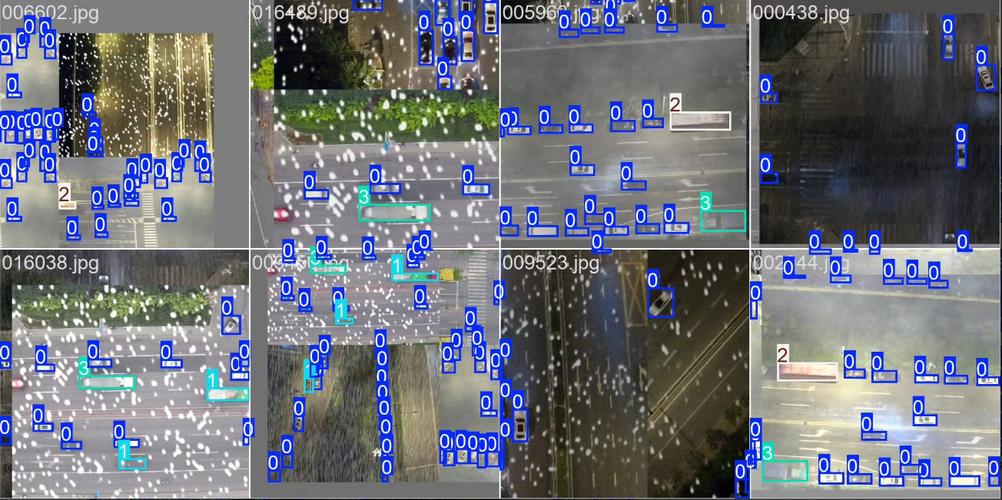
无人机算法:处理的是 “动态场景数据”,需应对多种干扰。
图像畸变多:飞行抖动会导致图像模糊、运动模糊;航拍角度多变(俯视、侧视),目标形态拉伸变形。
环境干扰强:高空光照变化快(如云层遮挡)、背景复杂(如地面纹理、树木遮挡),目标与背景对比度低。
数据实时生成:图像随飞行实时采集,无法提前预处理,需算法实时抗干扰(如动态去模糊、自适应光照校正)。
地面算法:处理的是 “静态场景数据”,数据更规整。
图像稳定:摄像头固定(如监控、工业质检),无抖动、角度固定,目标形态统一。
环境可控:地面场景光照、背景相对固定(如室内质检、商场监控),干扰因素少。
数据可离线预处理:可提前对数据做去噪、标注优化,算法无需过度适配动态干扰。
3. 实时性与应用目标:“即时决策” vs “高精度分析”
两者的应用场景目标不同,导致实时性优先级和功能设计差异显著。
无人机算法:以 “即时决策” 为核心,实时性优先于精度。
实时性要求极高:如避障场景需在 100ms 内识别障碍物并输出结果,否则会撞机;巡检场景需实时标记异常(如电网裂缝)。
应用目标聚焦:多为目标检测(如识别行人、车辆)、目标跟踪(如跟踪移动车辆)、语义分割(如分割农田与道路),功能单一但响应快。
地面算法:以 “高精度分析” 为核心,精度优先于实时性。
实时性要求低:如人脸识别可允许 1-2 秒的处理时间;医学影像分析甚至可离线完成。
应用目标复杂:可支持复杂任务(如医学影像的病灶分割、自动驾驶的多目标三维重建),需融合多模态数据(如图像 + 激光雷达),追求极致精度。
4、核心差异对比表
对比维度 | 无人机图像识别算法 | 地面图像识别算法 |
硬件约束 | ||
核心适配硬件 | 嵌入式模块、机载处理器(如边缘计算芯片) | 服务器、高性能 PC(如 GPU 工作站) |
算力水平 | 有限,仅支持轻量化模型 | 充足,可运行大参数量模型 |
功耗要求 | 敏感,需控制能耗以保障续航 | 无约束,可长时间高负载运行 |
内存限制 | 有限,需优化数据读写以降低占用 | 充裕,可缓存多帧数据与复杂特征 |
数据特性 | ||
图像稳定性 | 差,易受飞行抖动影响(模糊、变形) | 好,摄像头固定(无抖动、角度统一) |
环境干扰 | 强(光照突变、背景复杂、遮挡多) | 弱(光照 / 背景相对固定,干扰可控) |
数据生成方式 | 实时采集,无法提前预处理 | 可离线采集,支持提前去噪、标注优化 |
目标形态 | 多变(俯视 / 侧视导致拉伸、比例不一) | 规整(角度固定,目标形态统一) |
实时性要求 | ||
响应时间 | 极高(如避障需 100ms 内,巡检需实时标记) | 较低(如人脸识别允许 1-2 秒,可离线处理) |
优先级 | 实时性 > 精度(需快速输出决策) | 精度 > 实时性(追求结果准确性) |
应用目标 | ||
核心任务 | 目标检测、跟踪、简单语义分割(功能聚焦) | 复杂分割、多模态融合、三维重建(功能复杂) |
典型场景 | 无人机避障、电力巡检、农田测绘 | 医学影像分析、人脸识别、工业质检 |
典型算法示例 | MobileNet、YOLOv8-nano、SqueezeNet | ResNet、ViT(视觉 Transformer)、U-Net |
总结
简单来说,无人机图像识别算法是 “戴着镣铐跳舞”,在有限的硬件和动态的环境中,优先保证实时性和抗干扰能力;而地面算法是 “在稳定舞台上表演”,在充足的硬件和静态环境中,优先追求高精度和复杂功能。
请用手机扫码查看分享内容
 需求留言:
需求留言:
领先的边缘智能产品与解决方案提供商






华北地区负责人:17340067106(毛经理)
华东地区负责人:17358670739(甘经理)
华南、华西地区负责人:19113907060(耿女士)
软件算法咨询:18982151213(刘先生)
四川省成都市武侯区天府五街花漾锦江JR大厦B座7层(总部)
 试用申请
试用申请

 硬件设备咨询
软件算法咨询
硬件设备咨询
软件算法咨询

 在线客服
在线客服

 回到顶部
回到顶部





 商城
商城


















