
边缘检测是图像处理中识别图像中物体边界的关键技术,其核心原理基于图像中像素灰度(或颜色)的不连续性—— 边缘本质上是像素值发生剧烈变化的区域(如物体与背景的分界、不同物体的交界等),边缘检测的目标就是通过算法捕捉这种 “突变”。
具体来说,边缘检测的原理可从以下几个层面理解:
1. 边缘的本质:灰度不连续性
图像中,边缘对应像素灰度的快速变化(如从亮到暗的突然过渡)。这种变化可分为两类典型情况:
阶跃型边缘:灰度值从一个水平突然跳变到另一个水平(如物体轮廓);
屋顶型 / 斜坡型边缘:灰度值先快速变化后趋于稳定(如阴影边缘、渐变区域的分界)。
边缘检测的核心就是识别这些灰度变化的 “剧烈区域”。
2. 数学描述:用梯度衡量灰度变化
灰度的 “剧烈变化” 可通过数学导数量化:在一维信号中,导数的绝对值越大,表明变化越剧烈;在二维图像中,这种变化用梯度(Gradient) 描述。
对于图像的灰度矩阵 f(x,y),其梯度是一个向量,定义为:
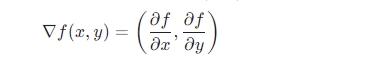
其中, 分别表示 x方向(水平)和y方向(垂直)的灰度变化率。
分别表示 x方向(水平)和y方向(垂直)的灰度变化率。
梯度的大小(模) 反映变化的剧烈程度(值越大,越可能是边缘):
梯度的方向则指向灰度变化最剧烈的方向(垂直于边缘走向)。
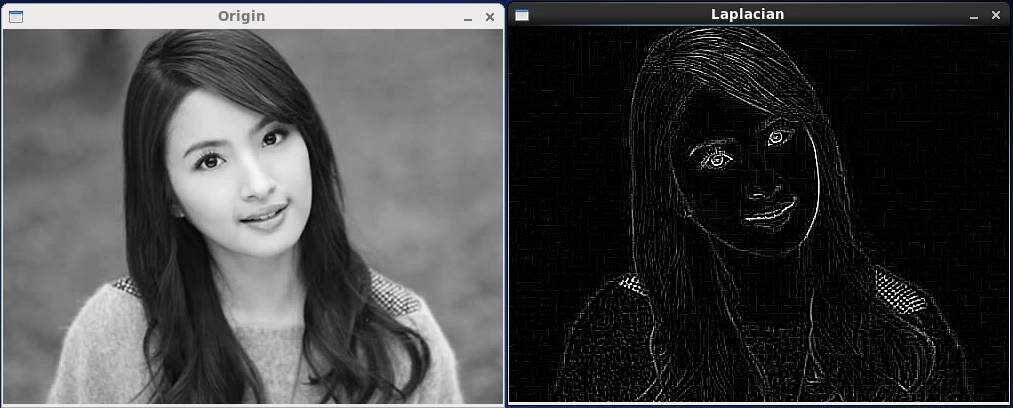
3. 实际计算:用卷积近似梯度
在数字图像中,无法直接计算连续导数,因此通过卷积运算用离散模板(算子)近似梯度。常用算子包括:
Sobel/Prewitt 算子:用 3×3 卷积核分别计算水平和垂直方向的差分(近似偏导数),再合成梯度大小;
Roberts 算子:用 2×2 卷积核计算对角线方向的差分,对陡峭边缘敏感;
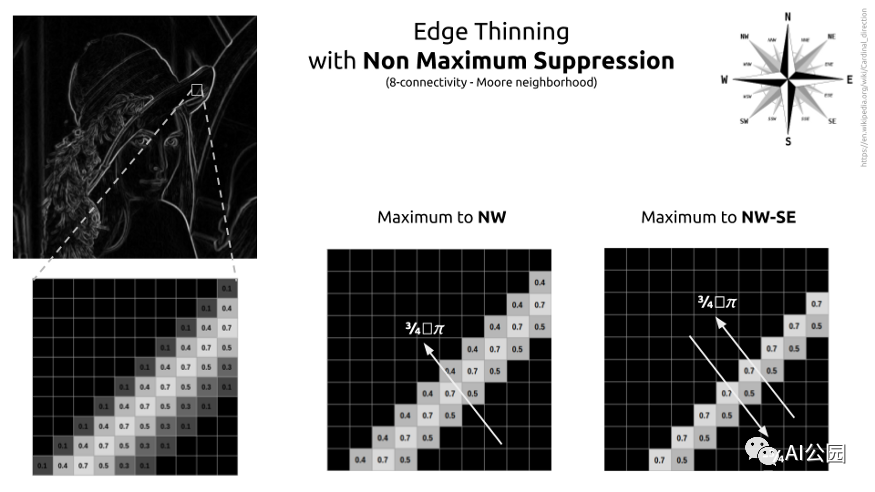
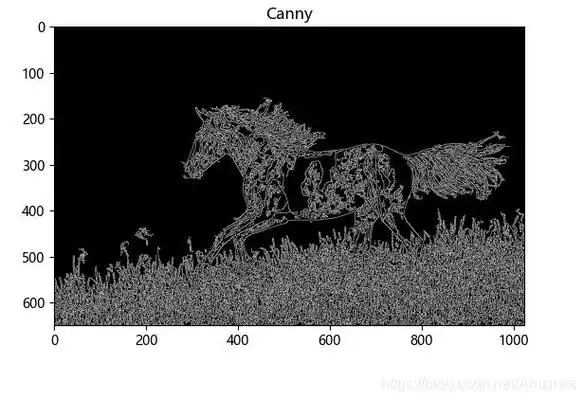
Canny 算子:更复杂的多步骤过程(包括高斯平滑去噪、梯度计算、非极大值抑制、双阈值筛选),能有效平衡边缘检测的准确性和抗噪声能力。
4. 抗噪声干扰:平滑与阈值筛选
噪声会导致灰度 “伪变化”(非边缘的突变),因此边缘检测通常需要:
平滑预处理:用高斯滤波等方法降低噪声(如 Canny 算子的第一步);
阈值判断:设定梯度大小的阈值,仅保留超过阈值的区域作为边缘(过滤微弱的噪声干扰)。
总结
边缘检测的核心原理是:通过检测图像中像素灰度的剧烈变化(用梯度量化),结合抗噪声处理,最终识别出真正的边缘区域。其本质是对图像中 “不连续性” 的数学建模与计算。
请用手机扫码查看分享内容
 需求留言:
需求留言:
领先的边缘智能产品与解决方案提供商






华北地区负责人:17340067106(毛经理)
华东地区负责人:17358670739(甘经理)
华南、华西地区负责人:19113907060(耿女士)
软件算法咨询:18982151213(刘先生)
四川省成都市武侯区天府五街花漾锦江JR大厦B座7层(总部)
 试用申请
试用申请

 硬件设备咨询
软件算法咨询
硬件设备咨询
软件算法咨询

 在线客服
在线客服

 回到顶部
回到顶部





 商城
商城


















