
YOLO系列算法凭借实时性强、精度高、易部署的优势,已成为工业场景跑冒滴漏(液体/蒸汽泄漏)实时检测的主流方案,可实现毫秒级识别、低误报、边缘端落地。
一、为什么选YOLO做跑冒滴漏检测
速度优先:单阶段检测,单帧推理**<50ms**,满足实时监控。
小目标/弱信号能力:v8/v10/v11通过PANet/AFP多尺度融合,可捕捉毫米级渗液、蒸汽雾、油渍等微弱特征。
轻量化适配:支持深度可分离卷积、剪枝、蒸馏,可在边缘盒子/摄像头端部署。
场景鲁棒:适配逆光、夜间、雾天、金属反光等工业复杂环境。
二、检测对象与典型场景
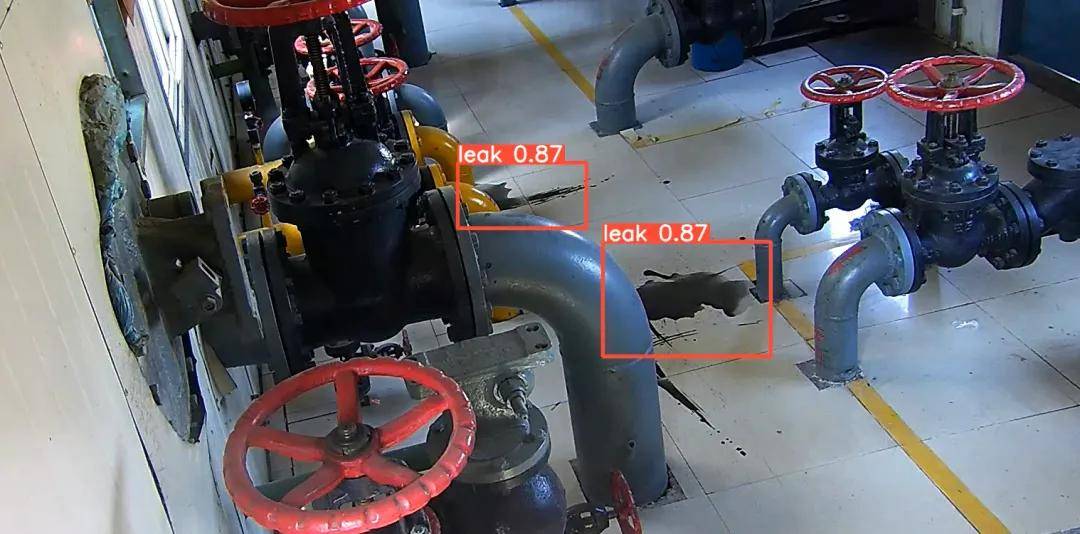
液体泄漏:油、水、酸碱液的滴漏、喷射、地面积液。
气体/蒸汽泄漏:高温蒸汽、可燃气体的持续喷射、扩散雾团。
应用场景:石化管道、化工园区、电厂、城市管网、工厂车间。
三、核心技术方案(YOLOv8/v10/v11为主)
1. 模型选型与优化
基础模型:优先YOLOv8n/s/m(平衡速度与精度);边缘端用YOLOv8n-tiny/YOLOv10n。
关键改进
特征增强:加入SE/CSAM注意力,强化泄漏边缘与纹理。
多尺度融合:AFP自适应特征金字塔,动态分配小目标权重。
轻量化:DWC+剪枝+蒸馏,参数量↓65%、速度↑3倍,精度保留90%+。
时序校验:**连续N帧(3–5帧)**检测+面积增长+光流判断,排除静态污渍/阴影,误报率从8.7%→1.3%。
2. 数据集构建(关键)
类别定义:leak_liquid、leak_steam、leak_oil、leak_drop。
数据覆盖
工况:正常/泄漏、不同压力/温度、不同介质。
环境:光照、雨雪、雾、逆光、夜间红外。
角度:俯视30°–45°(推荐)、侧视、远距离。
数据增强:旋转、缩放、亮度/对比度、噪声、MixUp、Mosaic。
3. 系统架构(边缘优先)
前端感知:工业摄像头(RGB+红外补光/热成像),部署在法兰、阀门、泵体、管道下方。
边缘推理:AI盒子(如BM1684X、Jetson)运行YOLO,本地实时分析,仅上传告警摘要。
异常判别:背景建模+前景提取+面积增长率+光流法,判断是否为动态泄漏。
告警与平台:分级告警(声光/APP/短信),对接EHS/设备管理平台。

四、部署与性能指标
部署方式
固定监控:关键点位7×24小时值守。
移动巡检:无人机/机器人搭载,覆盖长管线。
边缘端:单路1080P视频30fps+,延迟**<100ms**。
性能参考(工业实测)
mAP@0.5:92%–98%(优化后)。
推理速度:15–30 FPS(边缘端);50–100 FPS(服务器)。
最小检测:毫米级渗液、20米外3℃温差热泄漏。
误报率:<2%(时序+多模态校验后)。
五、落地步骤(从0到1)
1. 需求与场景梳理:明确介质、点位、环境、告警规则。
2. 数据采集与标注:现场拍摄+合成数据,用LabelImg/LabelStudio标注。
3. 模型训练与调优:迁移学习+数据增强+超参搜索,验证集评估。
4. 边缘部署与测试:在AI盒子上部署,现场强光/夜间/雾天实测。
5. 时序与多模态融合:加入连续帧校验、光流、传感器联动,降低误报。
6. 上线与迭代:7×24运行,用新数据持续微调模型。
六、常见问题与对策
小漏/远距看不清:用热成像+YOLO,或长焦+超分辨率预处理。
金属反光/逆光干扰:偏振镜头+直方图均衡化+暗通道先验去反光。
误报高:时序滑动窗口+面积增长+光流+传感器融合。
边缘算力不足:模型轻量化+TensorRT/ONNX Runtime加速。
七、总结
YOLO系列是跑冒滴漏实时检测的最优选择之一:速度快、精度高、易部署、可边缘落地。通过模型优化+时序校验+多模态融合,可在复杂工业环境中实现高可靠、低误报的24小时智能监控,大幅提升安全与运维效率。
请用手机扫码查看分享内容
 需求留言:
需求留言:
领先的边缘智能产品与解决方案提供商






华北地区负责人:17340067106(毛经理)
华东地区负责人:17358670739(甘经理)
华南、华西地区负责人:19113907060(耿女士)
软件算法咨询:18982151213(刘先生)
四川省成都市武侯区天府五街花漾锦江JR大厦B座7层(总部)
 试用申请
试用申请

 硬件设备咨询
软件算法咨询
硬件设备咨询
软件算法咨询

 在线客服
在线客服

 回到顶部
回到顶部





 商城
商城


















