
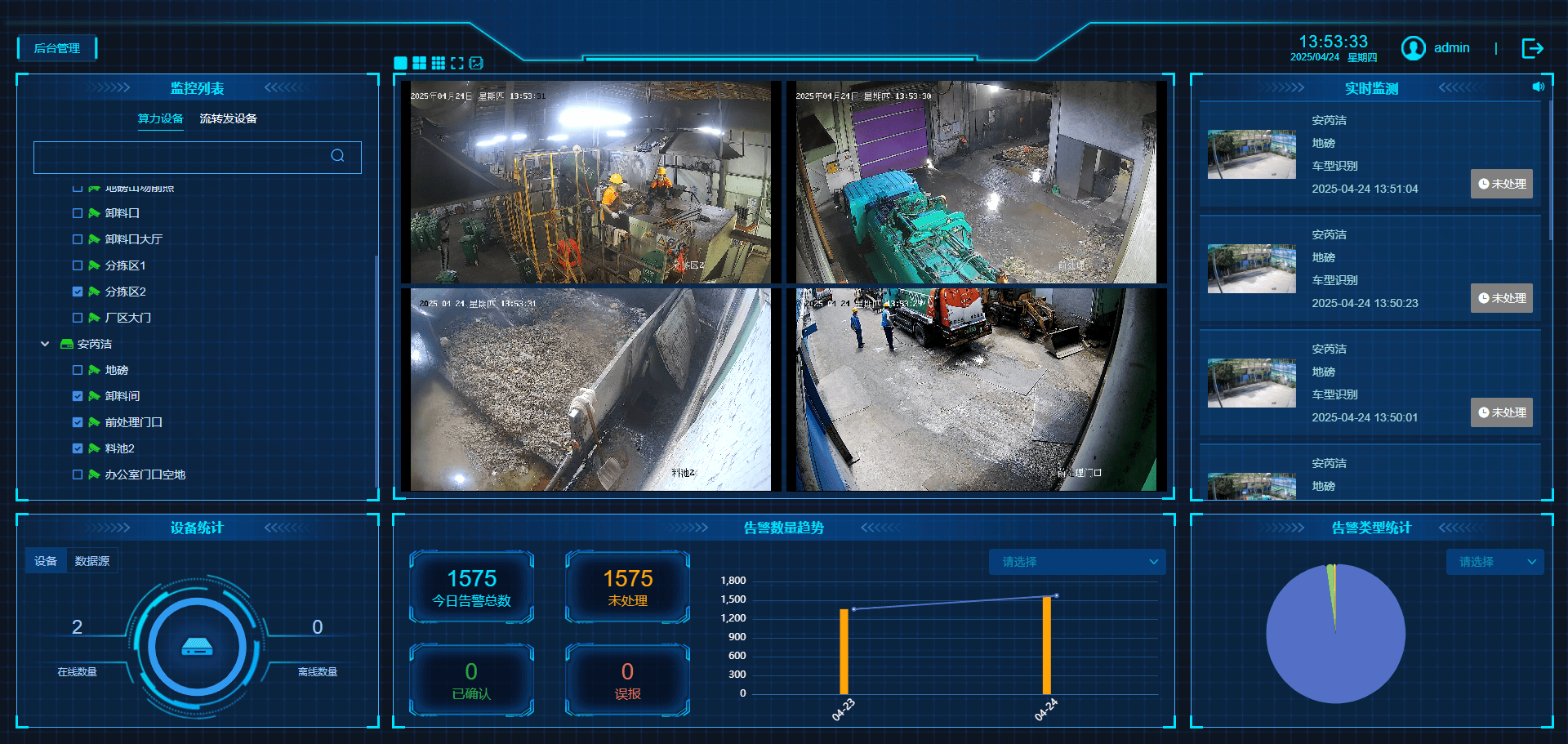
区域入侵侦测(Region Intrusion Detection,简称 RID)是安防监控系统的核心智能功能之一,其核心目标是在监控画面中预设特定警戒区域,当有符合条件的目标(如人、车、动物)进入 / 离开该区域时,自动触发告警,替代传统人工盯屏的低效模式,广泛应用于园区、交通、仓库、边境等场景。
一、区域入侵侦测算法原理
区域入侵侦测算法的本质是 “背景建模→目标提取→跟踪分析→区域判定→告警触发” 的全流程自动化处理,需解决 “如何区分背景与目标”“如何判断目标是否越界”“如何避免误报漏报” 三大核心问题,具体分为 5 个关键步骤:
步骤 1:图像预处理 —— 为后续分析 “降噪提效”
监控画面易受光照变化(如昼夜切换、灯光闪烁)、环境噪声(如雨雪、灰尘)、摄像头抖动影响,需先进行预处理,确保目标提取的准确性:
灰度化 / 彩色空间转换:将 RGB 彩色图像转为灰度图(减少计算量),或转为 HSV 空间(分离亮度与色彩,降低光照干扰);
去噪处理:用高斯滤波(平滑高频噪声)、中值滤波(去除椒盐噪声,如雨雪点)消除环境干扰;
图像增强:通过对比度拉伸、边缘增强(如 Sobel 算子),突出目标的轮廓(如人体、车辆的边缘特征)。
步骤 2:前景目标检测 —— 从背景中 “揪出” 移动物体
这是算法的核心环节,需先建立 “无目标时的背景模型”,再对比当前帧与背景模型的差异,提取出 “前景目标”(即可能触发入侵的移动物体)。主流技术方案分为传统背景建模法和深度学习检测法两类:
技术类型 | 核心原理 | 优势 | 劣势 | 适用场景 |
传统背景建模法 | 基于像素级差异,建立静态 / 动态背景模型,对比当前帧与模型的差异区域(前景) | 计算量小、实时性强、硬件要求低 | 对光照变化、动态背景(如树叶晃动)敏感,易误判 | 室内稳定环境(如仓库)、低算力设备 |
深度学习检测法 | 基于目标检测网络(如 YOLO、Faster R-CNN),直接识别并定位画面中的目标(人 / 车 / 动物) | 抗干扰能力强(可区分目标类型)、漏报率低 | 计算量较大,需 GPU/AI 芯片支持 | 复杂室外环境(如路口、园区)、高算力设备 |
关键技术细节:
传统背景建模的代表方案:
高斯混合模型(GMM):为每个像素建立多个高斯分布(如 3-5 个),分别对应 “背景像素”(如墙面、地面)、“动态背景”(如树叶晃动)、“前景像素”(如移动物体),通过概率判断像素是否属于前景;
ViBe 算法(视觉背景提取):初始化时用首帧像素构建背景样本库,后续帧通过对比 “当前像素与样本库的相似度”,判断是否为前景,对动态背景(如流水、树叶)的过滤效果优于 GMM;
帧差法(简单但局限):对比连续 2-3 帧的像素差异,差值超过阈值则视为前景,优点是速度快,但易产生 “空洞”(目标内部像素差异小,被误判为背景),仅适用于简单场景。
深度学习检测的优势:
不仅能提取 “移动物体”,还能识别目标类别(如仅对 “人 / 车” 触发告警,忽略 “飞鸟、猫犬”),通过目标的语义信息(如人体的头部、躯干特征)减少误报,是当前主流的高端方案。

步骤 3:目标跟踪 —— 持续 “盯紧” 目标,避免断联
前景检测仅能在单帧中找到目标,但若目标出现暂时遮挡(如人被树挡住)、帧间跳跃(如快速移动的车) ,易导致 “目标丢失”,需通过跟踪算法持续锁定目标位置:
主流跟踪算法:
卡尔曼滤波(Kalman Filter):预测目标下一帧的位置范围,结合当前帧的检测结果修正位置,适用于匀速 / 匀加速运动的目标(如行人、缓慢行驶的车);
Meanshift/Camshift:基于目标的颜色直方图,在后续帧中寻找与目标颜色分布最相似的区域,适用于目标颜色特征明显的场景(如红色车辆);
深度学习跟踪(如 SiamRPN):通过卷积神经网络(CNN)提取目标的深层特征,即使目标变形、遮挡,仍能稳定跟踪,适用于复杂动态场景。
跟踪的核心目的是获取目标的连续位置坐标(如每帧的中心点、外接矩形) ,为后续 “区域判定” 提供时间维度的连续数据。
步骤 4:区域判定 —— 判断目标是否 “越界入侵”
这是区域入侵的 “决策环节”,需先定义 “警戒区域”,再根据目标的位置与区域的关系,判断是否触发入侵条件:
1. 警戒区域定义(支持多种形态)
算法支持用户根据场景需求,在监控画面中绘制不同形状的警戒区域:
矩形区域:适用于规则场景(如门口、通道);
多边形区域:适用于不规则场景(如园区围墙、河道边界);
不规则区域:支持自定义曲线(如弧形护栏、圆形禁区)。
2. 入侵规则判定(可灵活配置)
根据业务需求,预设 “入侵触发条件”,常见规则包括:
进入判定:目标从区域外完全进入区域内(如行人走进园区禁入区);
离开判定:目标从区域内完全离开区域外(如仓库内货物被移出警戒区);
逗留判定:目标进入区域后停留时间超过阈值(如陌生人在厂区门口停留超 30 秒);
穿越判定:目标从区域一侧穿越到另一侧(如车辆横穿禁止通行的隔离带)。

3. 判定逻辑(以 “进入判定” 为例)
取目标跟踪得到的 “外接矩形中心点” 或 “目标轮廓的最小包围区域”,作为目标的 “位置代表”;
用几何算法判断该位置与警戒区域的关系:若目标中心点 / 轮廓的 90% 以上面积进入警戒区域(可配置阈值,避免边缘误触);且目标持续存在超过 1-2 帧(避免因帧间抖动导致的误判);则判定为 “入侵事件”。
步骤 5:告警触发与优化 —— 减少误报,确保可靠
为避免 “风吹动树叶、小动物闯入、光影变化” 等非警戒目标触发误报,算法需加入多维度过滤机制,再触发最终告警:
目标过滤:基于目标的尺寸(如过滤小于 0.5m×0.5m 的小动物)、形态(如区分人体与树干)、运动速度(如过滤快速飞过的飞鸟);
时间过滤:仅当目标入侵持续时间超过阈值(如 2 帧以上,约 0.06 秒)才告警,避免瞬时干扰;
历史行为过滤:对频繁出现的 “正常目标”(如园区内的巡逻车)进行白名单标注,不触发告警;
满足所有条件后,算法会触发多级告警:本地声光告警(如监控主机蜂鸣、指示灯闪烁)、远程告警(短信 / APP 推送至安保人员)、平台联动(同步录像、抓拍入侵瞬间图片,供后续溯源)。
二、监控区域入侵的使用流程与关键配置
区域入侵侦测的 “好用与否”,不仅取决于算法本身,更依赖 “场景适配 + 参数配置”,需遵循 “场景分析→设备选型→区域划定→参数调试→运行维护” 的流程:
1. 前期准备:明确需求与设备选型
在部署前需先明确 3 个核心需求,避免 “盲目选型”:
警戒目标:需检测 “人”(如园区防盗)、“车”(如停车场禁入区),还是 “所有移动物体”(如仓库防鼠)?
场景环境:是室内(如机房)还是室外(如厂区围墙)?是否有强光、雨雪、遮挡(如树木、建筑物)?
实时性要求:告警延迟需控制在多少(如交通场景需≤0.5 秒,仓库场景可放宽至 1 秒)?
设备选型建议:
低端场景(如小店、家庭):选择支持传统 GMM/ViBe 算法的 IPC(网络摄像头),无需额外算力,成本低;
中高端场景(如园区、路口):选择搭载 AI 芯片(如海思 Hi3519A、英伟达 Jetson)的智能 IPC,支持 YOLO 深度学习算法,抗干扰能力强;
超大场景(如边境、大型厂区):采用 “前端检测 + 后端平台联动” 模式,前端 IPC 负责初步过滤,后端服务器(GPU 集群)进行多相机协同分析,避免漏报。

2. 核心配置:3 步实现精准告警
步骤 1:划定警戒区域(关键!避免无效告警)
区域范围:需覆盖 “真正需要警戒的区域”,避免包含无关区域(如室外监控若包含路边树木,易因树叶晃动误报);
区域形状:室外围墙用 “多边形”,门口用 “矩形”,圆形设备区用 “不规则圆形”;
避免重叠:若多个摄像头覆盖同一区域,需避免警戒区域重复,防止重复告警。
步骤 2:配置入侵规则与目标过滤
规则选择:
防盗场景:选 “进入判定 + 逗留判定”(陌生人进入后停留即告警);
货物防流失场景:选 “离开判定”(货物移出警戒区即告警);
交通禁行场景:选 “穿越判定”(车辆横穿禁行线即告警);
目标过滤:
过滤 “小目标”:如设置 “目标宽度≥0.3m、高度≥0.5m”,排除飞鸟、猫犬;
过滤 “非目标类型”:深度学习算法可直接勾选 “仅检测人 / 车”,忽略其他物体。
步骤 3:调试灵敏度与告警阈值
灵敏度:高灵敏度易捕捉小目标,但误报率高;低灵敏度漏报率低,但可能忽略小目标(如儿童)。建议:
室外场景(光照变化大):灵敏度设为 “中低”,搭配时间过滤(≥2 帧);
室内场景(环境稳定):灵敏度设为 “中高”,快速响应入侵;
告警延迟:设置 “入侵后 0.5-1 秒再告警”,避免因目标短暂闯入(如行人路过边缘)触发误报。
3. 运行维护:减少后期误报
定期更新背景模型:若场景背景变化(如室内新增货架、室外季节变化),需重新初始化背景模型,避免将 “新背景” 误判为目标;
清理遮挡物:定期检查摄像头视野,移除遮挡物(如树枝、蛛网),避免因遮挡导致目标检测失效;
日志分析:定期查看告警日志,统计误报原因(如频繁因树叶晃动误报),针对性调整过滤参数(如增大目标尺寸阈值)。
三、区域入侵侦测的典型应用场景
不同场景的需求差异较大,需结合场景特点调整配置,以下为 3 类核心场景示例:
应用场景 | 警戒目标 | 区域划定方式 | 核心规则与配置 | 告警方式 |
园区周界防盗 | 人、无牌车辆 | 沿围墙画 “多边形区域” | 规则:“进入判定”;过滤:目标宽度≥0.4m、高度≥0.6m(排除小动物);灵敏度:中低(应对夜间灯光变化) | 声光告警(围墙声光报警器)+ APP 推送(安保人员) |
停车场禁入区 | 非授权车辆 | 禁停区域画 “矩形” | 规则:“进入判定 + 逗留判定(≥10 秒)”;过滤:仅检测 “车辆”(排除行人);灵敏度:中(应对车辆灯光) | 道闸联动(禁止抬杆)+ 短信告警(管理员) |
仓库货物区 | 人、搬运设备 | 货架周围画 “不规则区域” | 规则:“进入判定 + 离开判定”(防止人进入偷货、货物被移出);过滤:目标速度≤1m/s(排除灰尘、飞虫) | 本地蜂鸣 + 监控平台弹窗(联动录像) |
四、算法选型建议
优先选深度学习算法:若场景复杂(如室外、多遮挡)、需区分目标类型,且预算允许(需 AI 芯片支持),深度学习算法(YOLO+SiamRPN 跟踪)的准确率比传统算法高 30%-50%;
传统算法兜底:若场景简单(如室内无遮挡)、预算有限,选择 ViBe 算法(抗动态背景),成本低且实时性强;
注意硬件适配:深度学习算法需 IPC 搭载 NPU(神经网络处理单元)或后端服务器支持 GPU,避免因算力不足导致告警延迟。
综上,区域入侵侦测的核心是 “算法精准提取目标 + 配置适配场景需求”,需结合实际场景的目标类型、环境干扰、实时性要求,通过 “前期选型 + 中期配置 + 后期维护” 实现 “少误报、少漏报、高可靠” 的智能警戒效果。
请用手机扫码查看分享内容
 需求留言:
需求留言:
领先的边缘智能产品与解决方案提供商






华北地区负责人:17340067106(毛经理)
华东地区负责人:17358670739(甘经理)
华南、华西地区负责人:19113907060(耿女士)
软件算法咨询:18982151213(刘先生)
四川省成都市武侯区天府五街花漾锦江JR大厦B座7层(总部)
 试用申请
试用申请

 硬件设备咨询
软件算法咨询
硬件设备咨询
软件算法咨询

 在线客服
在线客服

 回到顶部
回到顶部





 商城
商城


















