
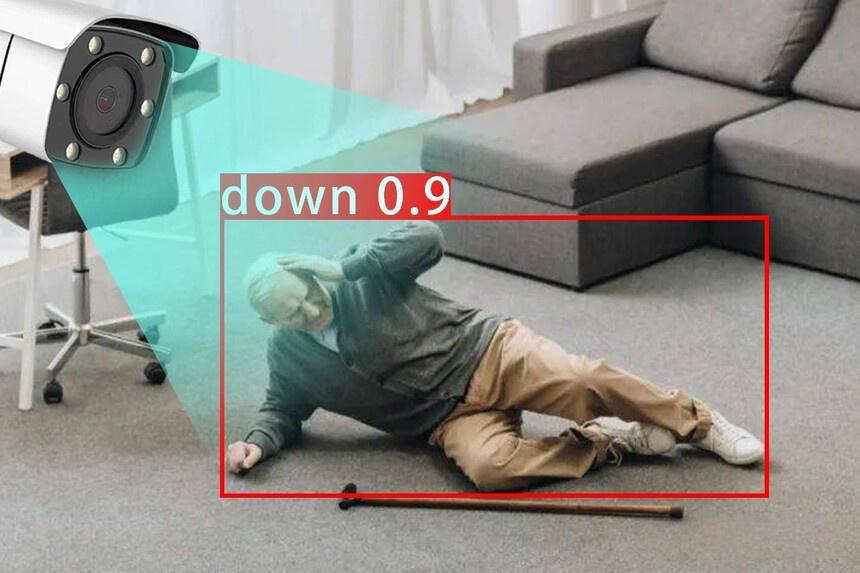
嵌入式跌倒检测算法是针对资源受限场景(如智能手环、养老监测终端、工业安全帽等嵌入式设备)设计的,以 “低算力、低内存、低功耗” 为核心约束,同时满足实时性和检测准确性的算法体系。其核心目标是区分 “跌倒行为” 与 “日常活动”(如行走、坐下、弯腰等),并在跌倒发生时快速触发报警(如向家属或平台发送通知)。
一、嵌入式跌倒检测的核心约束
嵌入式设备的硬件限制直接决定了算法设计方向,需优先解决以下问题:
算力有限:多基于 MCU(微控制器,如 STM32)或轻量级 SoC(系统级芯片),无独立 GPU/TPU,无法运行复杂深度学习模型;
内存 / 存储小:RAM 通常为 KB~MB 级,Flash 存储有限,需精简模型参数和中间数据;
功耗敏感:多依赖电池供电(如手环续航需数天),算法需减少计算量和传感器采样频率;
实时性要求:跌倒检测需在 1~2 秒内完成判断(避免延误救援),端到端延迟需控制在 100ms 以内。
二、嵌入式跌倒检测算法的核心流程
算法通常遵循 “数据采集→预处理→特征提取→分类判断” 四步流程,每一步均需适配嵌入式资源约束:
1. 数据采集:轻量化传感器选择
嵌入式设备多依赖低成本、低功耗传感器采集人体运动数据,核心传感器类型如下:
传感器类型 | 核心参数 | 优势 | 适用场景 |
IMU(惯性测量单元) | 3 轴加速度计(Acc)、3 轴陀螺仪(Gyro) | 体积小、功耗低(μA 级)、成本低 | 主流选择(如手环、手表) |
气压计 | 海拔 / 高度变化 | 辅助判断 “垂直方向位移”(跌倒时高度骤降) | 提升检测准确性(减少误判) |
毫米波雷达 | 距离、速度、姿态信息 | 无接触、抗遮挡(穿透衣物) | 养老床旁监测、室内场景 |
红外接近传感器 | 物体接近距离 | 辅助判断 “是否撞击地面” | 低成本补充(如安全帽) |
主流方案:以 “IMU(加速度计 + 陀螺仪)” 为核心,部分设备叠加气压计(成本增加但准确性提升)。
2. 预处理:降低噪声与数据量
原始传感器数据存在噪声(如 IMU 的温度漂移、运动抖动),且数据量较大(如 100Hz 采样率下,1 秒产生 600 个数据点),需通过轻量化处理减少后续计算压力:
滤波去噪:优先选择计算简单的滤波算法,避免复杂矩阵运算:
滑动平均滤波:对连续 N 个数据点取平均(N 通常为 3~5),抑制高频噪声;
一阶卡尔曼滤波(简化版):适用于陀螺仪数据,修正漂移误差(仅保留核心递推公式,减少内存占用);
数据降采样:将原始采样率(如 100Hz)降至 20~50Hz,在不损失关键信息的前提下减少数据量;
异常值处理:通过 “阈值法” 剔除极端值(如传感器瞬间故障产生的异常数据),避免干扰后续判断。
3. 特征提取:关键信息压缩
特征提取是嵌入式算法的核心—— 需从预处理后的原始数据中,提取 “能区分跌倒与日常活动” 的关键特征,同时保证计算量最小。常用特征分为三类:
(1)时域特征(最常用,计算量最小)
基于加速度计 / 陀螺仪的时域数据(如加速度大小、角度变化)计算,无需频域变换,适合嵌入式场景:
加速度相关:
峰值加速度:跌倒时人体撞击地面会产生骤增的加速度峰值(通常 > 2g,日常活动 < 1.5g);
加速度方差:跌倒时加速度波动剧烈,方差显著高于行走、站立等平稳活动;
垂直方向加速度(Z 轴):跌倒时 Z 轴加速度会从 “正方向(站立)” 快速转为 “负方向(撞击地面)”;
姿态相关:
倾角(Pitch/Roll):通过加速度计计算人体与水平面的夹角(如站立时倾角≈0°,跌倒后倾角≈90° 或 180°);
姿态变化率:陀螺仪计算角度变化速度,跌倒时姿态变化率远高于日常活动(如坐下的缓慢角度变化);
高度相关:气压计计算人体高度变化,跌倒时高度会在 1~2 秒内下降 30cm 以上(日常活动无此骤降)。
(2)频域特征(轻量化简化版)
频域特征能反映运动的频率分布(如跌倒的高频冲击 vs 行走的低频周期性),但传统傅里叶变换(FFT)计算量大,嵌入式场景需简化:
采用短时傅里叶变换(STFT)简化版:将数据分帧(每帧 10~20 个数据点),仅计算低频段(0~10Hz)的能量分布;
或直接计算 “信号能量比”:高频段(5~10Hz,跌倒冲击)与低频段(0~5Hz,日常活动)的能量比值,跌倒时比值显著更高。
(3)时域 - 频域联合特征(可选,提升准确性)
如 “小波变换简化版”(仅保留 1~2 层分解),提取不同尺度下的信号能量,平衡准确性与计算量,但仅在算力稍强的嵌入式设备(如带 NPU 的 SoC)中使用。

4. 分类判断:轻量化模型选型
分类阶段需根据提取的特征,判断 “是否为跌倒”,核心要求是模型小、推理快,主流方案分为两类:
(1)传统机器学习算法(主流选择)
模型参数少、推理速度快(毫秒级),无需训练过程(或仅需简单离线训练),完全适配 MCU 级设备:
算法类型 | 核心原理 | 嵌入式优势 | 适用场景 |
阈值法 | 设定特征阈值(如峰值加速度 > 2g、倾角 > 80°),满足多个阈值则判定为跌倒 | 无模型参数,仅需条件判断,算力消耗最低 | 低成本设备(如简易跌倒报警器) |
决策树 | 基于特征构建 “if-else” 决策规则(如 “峰值 > 2g?→ 是→ 倾角 > 80°?→ 是→ 跌倒”) | 推理快(仅需遍历树节点),可解释性强 | 中等算力设备(如 STM32F4 系列 MCU) |
支持向量机(SVM)简化版 | 离线训练一个线性 SVM 模型(仅保留支持向量和权重),推理时计算特征与权重的内积 | 模型参数少(KB 级),泛化能力优于阈值法 | 需提升准确性的场景(如养老手环) |
K 近邻(KNN)简化版 | 离线存储少量 “跌倒 / 非跌倒” 样本特征,推理时计算待检测特征与样本的距离,取近邻投票 | 无需训练,仅需存储样本,适合动态更新 | 样本易获取的场景(如工厂工人监测) |
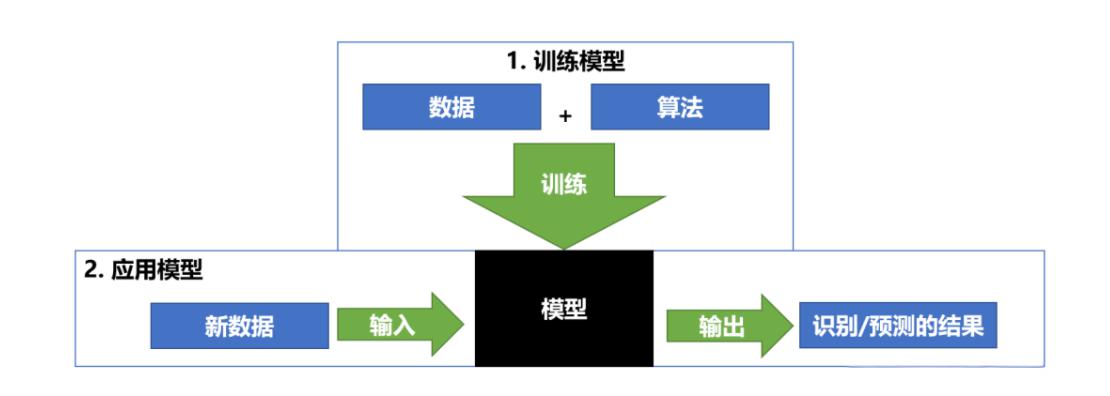
(2)轻量化深度学习算法(新兴方向)
随着嵌入式 NPU(如华为昇腾 310P、瑞芯微 RK3568)的普及,部分设备开始采用轻量化深度学习模型,需通过模型压缩适配资源:
模型选型:优先选择 “参数 < 10 万、计算量 < 1M FLOPs” 的模型,如:
Tiny-CNN(3~5 层卷积,仅用 1×1 卷积减少参数);
轻量级 LSTM(简化隐藏层数量,仅 1~2 层,输入特征维度 < 10);
联邦学习辅助:边缘端(嵌入式设备)仅负责推理,云端统一训练模型并下发压缩后的参数,避免端侧训练;
模型压缩技术:
量化:将 32 位浮点数(FP32)量化为 8 位整数(INT8),模型体积缩小 4 倍,推理速度提升 2~3 倍;
剪枝:移除冗余的卷积核或神经元(如移除权重绝对值 < 0.01 的参数),进一步减小模型大小;
知识蒸馏:用复杂模型(云端)的 “知识” 训练轻量化模型(端侧),保证准确性的同时简化模型。
三、嵌入式跌倒检测的关键挑战与优化策略
1. 挑战 1:算力与准确性的平衡
问题:复杂特征(如频域特征)或模型(如 CNN)能提升准确性,但会超出嵌入式算力;
优化:
特征筛选:通过 “相关性分析” 剔除冗余特征(如仅保留 “峰值加速度、倾角、高度变化”3 个核心特征);
硬件加速:在 SoC 中集成轻量化 NPU(如全志 V831,支持 INT8 推理),或用 FPGA 实现关键计算(如 FFT 加速)。
2. 挑战 2:低功耗与实时性的平衡
问题:高采样率(如 100Hz)能提升实时性,但会增加传感器和计算功耗;
优化:
动态采样率:日常状态下采用低采样率(20Hz),当检测到 “疑似跌倒前兆”(如加速度波动增大)时,临时提升至 50Hz;
间歇计算:每 100ms 计算一次特征(而非实时计算),减少 CPU 唤醒次数(如 STM32 的低功耗模式下,仅定时器唤醒 CPU 进行计算)。
3. 挑战 3:鲁棒性(减少误判 / 漏判)
问题:不同用户(如老人 vs 年轻人)的动作差异、传感器佩戴位置偏移(如手环松动)会导致误判;
优化:
自适应阈值:根据用户日常活动数据(如 1 周内的加速度峰值)动态调整阈值(如老人的阈值调低至 1.8g,避免漏判);
多传感器融合:结合 IMU + 气压计 + 毫米波雷达的数据,交叉验证(如 IMU 检测到峰值加速度,且雷达检测到 “人体高度骤降”,才判定为跌倒);
误判修正:若判定为跌倒后,10 秒内检测到 “人体主动起身”(倾角恢复至 0°),则修正为 “误判”,避免虚假报警。
四、典型应用案例
养老智能手环:
硬件:STM32L4 MCU(低功耗)+ 6 轴 IMU + 气压计;
算法:阈值法 + 决策树(特征:峰值加速度、倾角、高度变化);
性能:功耗 < 10μA(待机),检测延迟 < 500ms,误判率 < 5%。
工业安全帽跌倒检测:
硬件:瑞芯微 RK3566(带 NPU)+ 6 轴 IMU + 毫米波雷达;
算法:量化后的 Tiny-CNN(输入特征:加速度时域 + 简化频域特征);
性能:推理速度 < 30ms,适应工厂嘈杂环境(抗振动干扰),漏判率 < 3%。
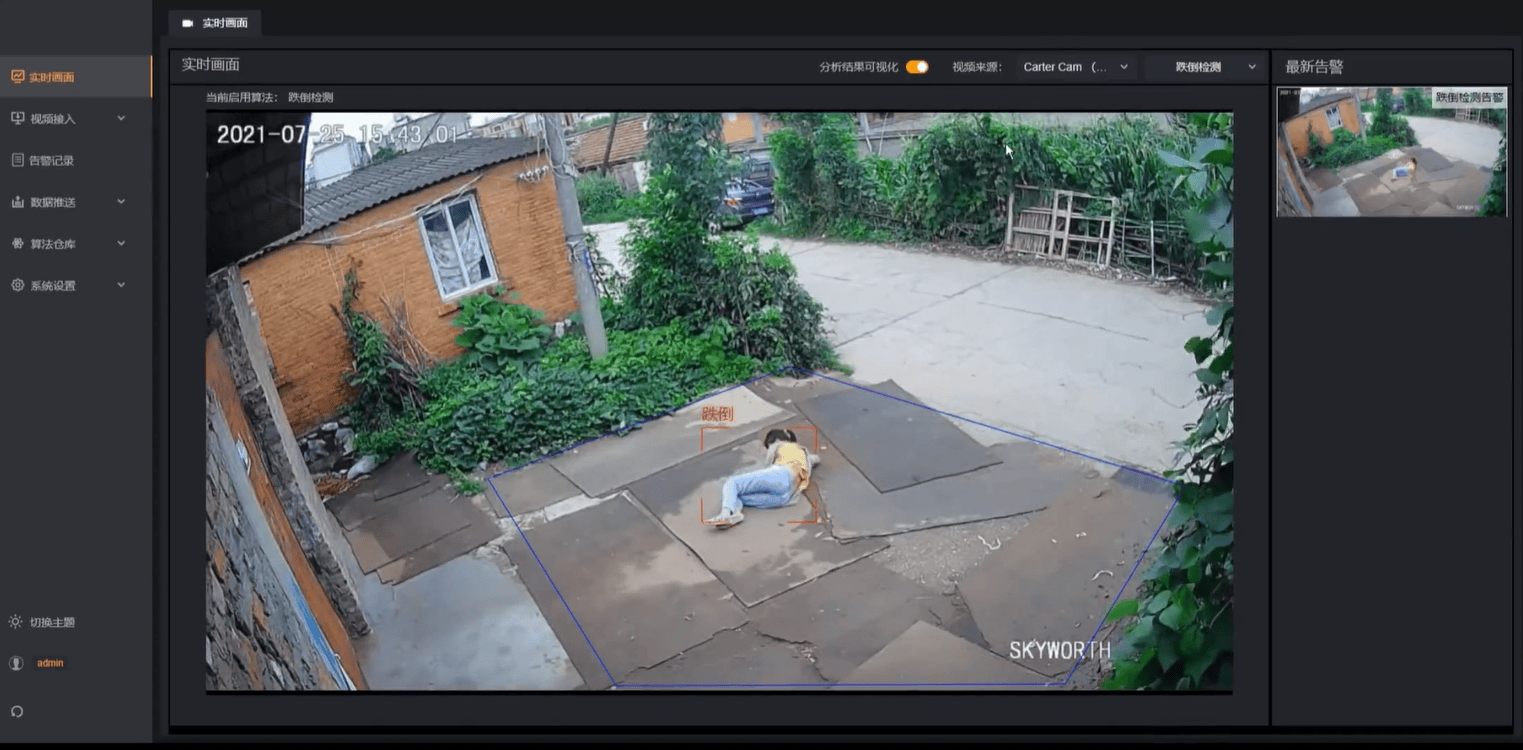
居家养老床旁监测器:
硬件:华为海思 Hi3516(带 NPU)+ 毫米波雷达;
算法:轻量化目标检测模型(检测人体姿态变化)+ 跌倒特征判断;
优势:无接触监测(老人无需佩戴设备),适合行动不便人群。
五、发展趋势
多模态融合:结合 IMU、毫米波雷达、视觉(低分辨率摄像头)数据,进一步提升准确性(如视觉确认 “是否倒地”,减少误判);
端云协同智能:嵌入式端负责 “实时粗判”(快速检测疑似跌倒),云端负责 “精准细判”(结合历史数据、环境数据修正结果);
隐私保护:嵌入式端仅上传 “特征数据”(如峰值加速度、倾角),而非原始传感器数据(如 IMU 原始序列),避免隐私泄露;
自适应个性化:通过联邦学习,在不共享用户数据的前提下,为不同用户(如老人、残疾人)定制专属模型,提升鲁棒性。
综上,嵌入式跌倒检测算法的核心是 “在资源约束下平衡准确性、实时性、功耗”,其设计需紧密结合硬件能力,优先选择轻量化的特征与模型,并通过多传感器融合、自适应优化等策略提升实际应用效果。
请用手机扫码查看分享内容
 需求留言:
需求留言:
领先的边缘智能产品与解决方案提供商






华北地区负责人:17340067106(毛经理)
华东地区负责人:17358670739(甘经理)
华南、华西地区负责人:19113907060(耿女士)
软件算法咨询:18982151213(刘先生)
四川省成都市武侯区天府五街花漾锦江JR大厦B座7层(总部)
 试用申请
试用申请

 硬件设备咨询
软件算法咨询
硬件设备咨询
软件算法咨询

 在线客服
在线客服

 回到顶部
回到顶部





 商城
商城


















