
一、核心逻辑:把计算从云端下沉到设备就近节点
传统物联网架构是设备→网关→公网→云端服务器,所有原始采集数据全部上传云端分析、决策后再下发指令;
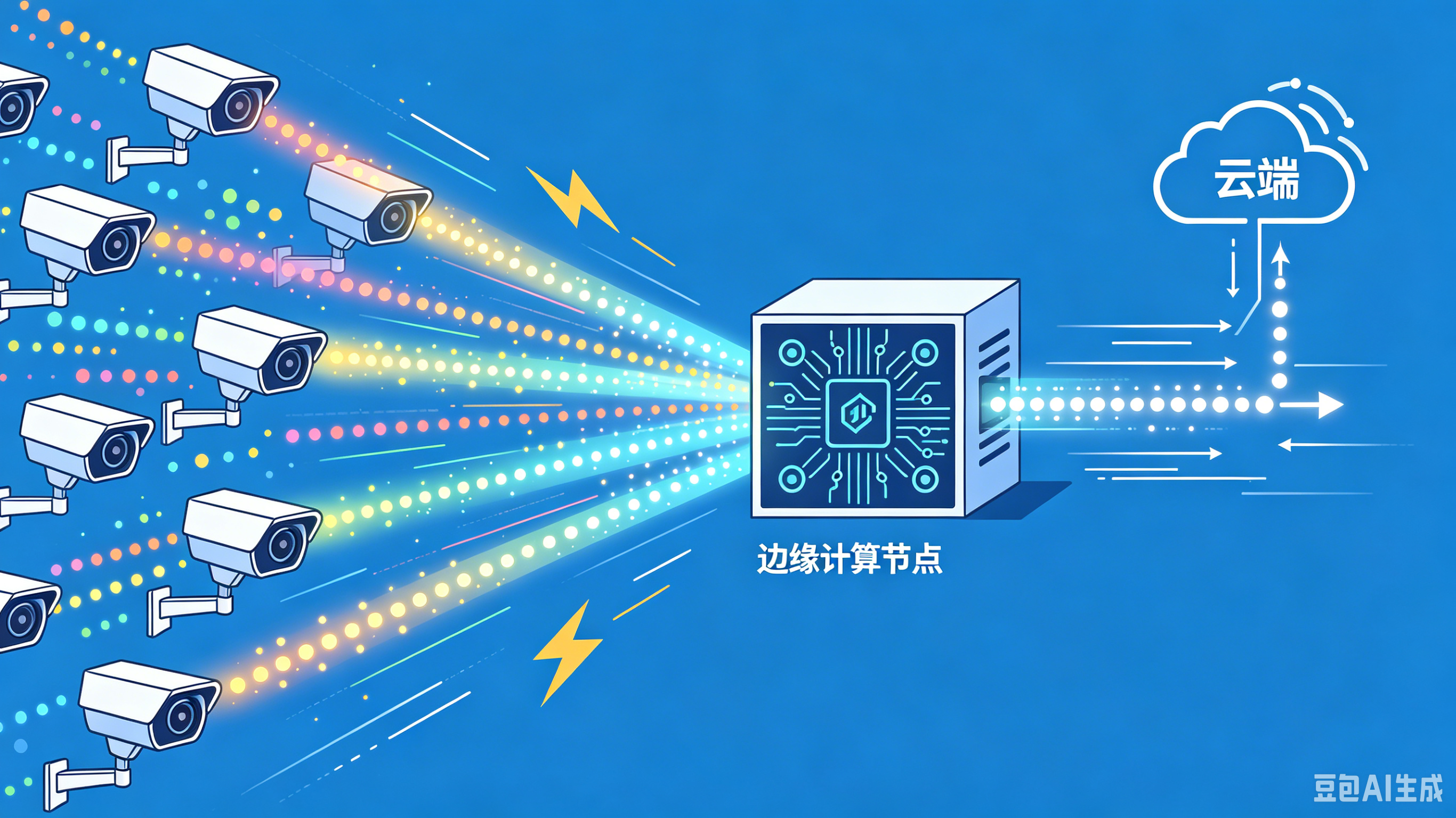
边缘计算在设备侧、网关侧、本地边缘节点部署算力,数据不用远距离往返云端,实现本地实时处理,从传输、算力、链路三层压缩延迟。
二、五大关键提速机制
1. 缩短数据传输距离,消除网络往返延迟
1. 传统云模式:传感器数据跨城 / 跨省公网传输,存在光纤路由、基站转发、带宽拥堵,往返延迟几十~数百毫秒,甚至网络波动达到秒级;
2. 边缘模式:数据在厂区、机房、楼道本地边缘盒 / 网关处理,传输距离仅几米到几公里,省去跨运营商、跨地域路由;
3. 典型场景:工业机械臂、自动驾驶车载感知、安防人脸识别,本地边缘直接输出控制指令,往返延迟从 100ms + 降至 5~20ms。
2. 数据本地过滤,大幅减少上传数据量
物联网设备海量原始数据(摄像头视频、振动传感器、温湿度高频采样)90% 以上为无效数据:
边缘端实时做清洗、降噪、筛选:只上传异常画面、超限告警数据,普通正常数据就地丢弃;
效果:降低带宽占用,避免大流量数据包排队拥堵,减少网络排队延迟;同时云端不用接收冗余数据,下发指令更快。
例:安防摄像头,边缘识别无人员画面不回传视频,仅有人时上传截图,网络负载下降 80%。
3. 本地实时推理与决策,不依赖云端反馈
云端存在算力排队、并发拥堵,高并发物联网设备同时上报会产生算力等待延迟;
边缘搭载 NPU / 嵌入式算力芯片(RK3588、BM1684X、LQ50 等),本地运行 AI 算法、阈值判断、逻辑控制:
工业场景:机床振动超标,边缘直接下发停机保护指令,不用等云端分析;
智能家居:人体传感器检测到人,边缘网关立刻开灯,无云端等待;
断网容错:外网中断时边缘仍能自主控制设备,不会完全失效,云端恢复后同步历史记录。
4. 规避公网网络不稳定问题
公网存在 4G/5G 波动、宽带丢包、高峰期限速、远程服务器宕机等问题:
边缘计算依托局域网 / 本地专网通信,不受互联网拥堵影响;
对低时延刚需场景(AGV 小车、电力继电保护),彻底规避外网延迟抖动带来的失控风险。
5. 分层算力分担,减轻云端并发压力
海量物联网设备并发接入时,云端 CPU/GPU 资源容易占满,处理排队拉长响应时间;
采用端 边 云分层架构:
1. 终端微算力:简单阈值判断(温湿度报警);
2. 边缘节点:复杂 AI 识别、实时控制;
3. 云端:长期大数据分析、模型训练、全局调度;
边缘承接 90% 实时计算任务,云端只做离线统计与模型更新,云端无实时并发压力,下发全局指令速度同步提升。
三、量化延迟对比示例
场景 | 纯云端架构延迟 | 边缘计算架构延迟 |
厂区 AGV 障碍物识别 | 120~300ms | 10~30ms |
高清摄像头人脸识别告警 | 150~500ms | 15~40ms |
工业设备超限紧急停机 | 80~200ms | <10ms |
智能家居人体感应联动 | 60~180ms | <20ms |
四、典型行业落地效果
1. 工业物联网
产线传感器、视觉质检相机本地边缘推理,毫秒级缺陷识别,同步触发剔除机构,云端仅汇总良品数据,大幅提升产线实时控制能力。
2. 智慧安防
多路摄像头本地做人形、车牌识别,异常瞬间弹窗告警,无需把整段视频上传云端,杜绝卡顿延迟。
3. 车联网 / 自动驾驶
车载边缘计算单元处理雷达、摄像头感知数据,紧急刹车、避让本地决策,云端仅做路线规划。
4. 智能电力
变电站边缘网关实时监测电流电压,故障毫秒级跳闸保护,公网中断不影响本地安全控制。
五、总结核心提速本质
边缘计算通过就近计算、本地过滤、离线自治、分层减负,砍掉物联网数据 “设备 云端” 长距离往返链路,规避公网延迟与云端算力拥堵,把感知、分析、控制闭环留在本地,从根源缩短设备响应时间,同时保障弱网 / 断网下设备可控。
请用手机扫码查看分享内容
 需求留言:
需求留言:
领先的边缘智能产品与解决方案提供商






华北地区负责人:17340067106(毛经理)
华东地区负责人:17358670739(甘经理)
华南、华西地区负责人:19113907060(耿女士)
软件算法咨询:18982151213(刘先生)
四川省成都市武侯区天府五街花漾锦江JR大厦B座7层(总部)
 试用申请
试用申请

 硬件设备咨询
软件算法咨询
硬件设备咨询
软件算法咨询

 在线客服
在线客服

 回到顶部
回到顶部





 商城
商城


















