2025 年,中国国产智算卡生态在政策驱动、技术迭代与市场需求的多重作用下,正经历从 “进口依赖” 到 “自主可控” 的历史性转折。这一进程不仅重塑了全球 AI
构建自主可控的 AI 算力生态闭环需要开源框架与国产芯片的深度协同,通过全栈技术创新和产业链整合实现从底层硬件到上层应用的自主化。以下是具体路径及实践:一、硬件
根据行业研究与市场预测,2025-2028年人工智能算力市场将经历结构性变革,推理算力占比预计从 2024 年的 65% 跃升至 2028 年的 73%,智算卡
在六芯异构协同训练的技术浪潮下,智算卡生态正通过全栈式软硬协同创新打破 “硬件强、软件弱” 的传统困局。以下从技术架构、软件栈突破、生态协同三个层面展开分析:一
一、算力密度革命:从 3.2 倍到 4.2 倍的跨越边缘服务器正经历一场算力密度的质变。从传统通用 CPU 到专用芯片架构的转变,使算力密度提升3.8 倍成为行
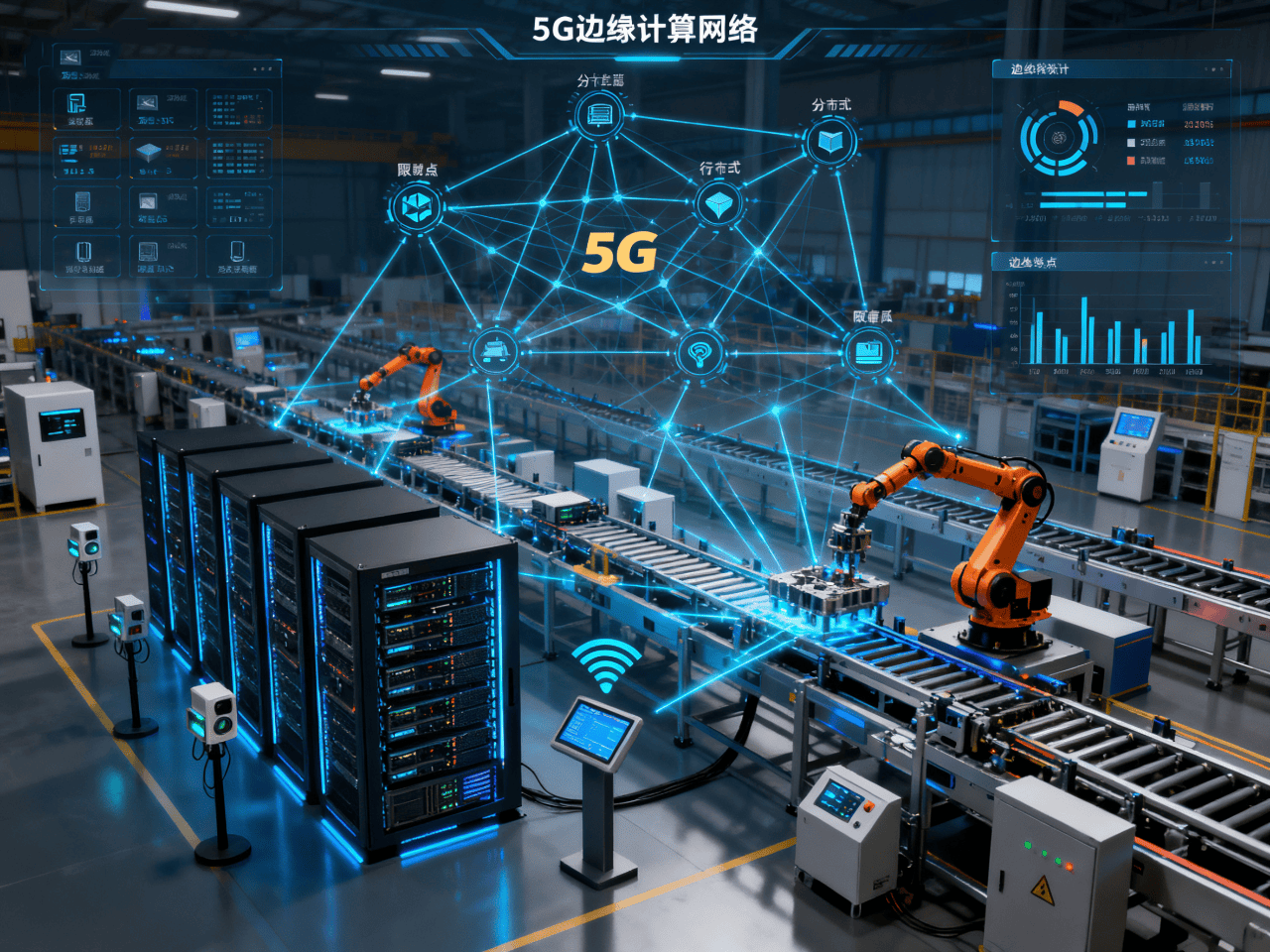
一、边缘大脑:智能交通的神经中枢车路云一体化系统中的 "边缘大脑" 是指部署在路侧的多接入边缘计算 (MEC) 设备集群,它像交通系统的 &
一、传统生产模式的停机困境停机成本惊人:一条典型生产线每小时停机损失高达 18 万元,月均停机损失可达 50 万元以上;响应严重滞后:传统云架构决策延迟高达 2
一、千亿级端侧智能市场:爆发式增长的新蓝海端侧 AI 市场正迎来井喷式发展:全球市场规模预计从 2025 年的 3219 亿元增至 2029 年的 1.22 万
一、边缘大模型网关:AI 服务的 "边缘神经中枢"定义与定位边缘大模型网关是部署在网络边缘节点的服务,允许用户通过单一 API 接口访问多家
医疗物流机器人已成为智慧医院的 "隐形配送员",其背后的 AI 边缘盒子是实现毫秒级响应与隐私保护的核心引擎。基于最新技术研究和行业应用,A
一、边缘大脑:智慧交通的 "神经中枢""边缘大脑" 是部署在交通现场的智能边缘计算设备,如同城市交通的 "神经
一、边缘计算市场爆发:从单点到协同的必然趋势市场规模激增:IDC 预测,到 2028 年全球边缘计算支出将达378 亿美元,年复合增长率达17%;公有云边缘服务
市场规模:高速增长,2025 年突破 178 亿中国边缘 AI 盒子市场正处于爆发期:2024 年市场规模已达138.6 亿元,同比增长 29.3%;预计202
一、边缘计算架构:质检革命的基础设施富士康在深圳 "灯塔工厂" 部署的 2000 台边缘 AI 盒子(BOXiedge 系统)构建了 &qu
一、OTII-E 标准:边缘 AI 的模块化新范式OTII-E(开放电信基础设施扩展标准)是开放数据中心委员会 (ODCC) 推出的边缘计算标准,专为解决传统边
一、边缘计算的范式革命:从 "卸载中转站" 到 "原生智能体"传统边缘计算架构主要扮演 "卸载" 角
一、边缘 AI 的核心挑战与破局思路1. 边缘设备三大痛点资源极限:内存8GB,计算能力 1-10 GFLOPS,远低于大模型需求延迟敏感:实时应用需 <
硬盘录像机(DVR/NVR)与边缘盒子主要通过有线以太网连接,部分场景可支持无线连接,核心是让两者处于同一网络并完成设备添加。这个连接逻辑很关键,因为边缘盒子通
计算视频边缘服务器所需算力需综合考虑四大核心因素:视频流参数 (分辨率 / 帧率)、编码格式、处理类型 (转码 / 分析) 和并发路数。以下是完整计算方法:一、
一、核心概念与意义油料补给智能预测是利用人工智能、大数据、物联网等技术,通过分析历史消耗数据、实时状态信息和外部影响因素,对未来油料需求进行精确预判的系统工程。
厨房油温异常和地面油污识别,核心是通过 “技术监测 + 人工巡检” 结合,实现风险提前预警和及时处理,避免火灾、滑倒等安全事故。一、油温异常识别方案油温异常主要
提高算法识别食材隐患的准确率,核心是解决 “场景适配不足、特征提取不精、数据覆盖不全” 三大问题,需从数据优化、模型迭代、场景适配、多模态融合四个维度系统性落地
算法识别食材隐患主要通过视觉特征分析 + 多模态数据融合实现,针对 “生熟混放、食材变质、过期、清洗不彻底” 等核心场景,采用不同技术路径精准判断,本质是让 A
一、核心技术架构厨房卫生智能监测系统通过 "感知 - 分析 - 预警 - 管理" 闭环,实现对厨房全场景卫生隐患的实时识别与处置:层级功能技
AI 计算卡凭借其强大的并行计算能力和针对深度学习优化的架构,广泛适用于以下核心场景:一、数据中心与大规模 AI 训练大模型开发与迭代旗舰级计算卡如 NVIDI
以下是 AI 计算卡与传统 GPU 在 AI 任务上的性能对比表格,涵盖架构设计、核心性能指标、实际任务表现及能效成本等关键维度:维度AI 计算卡(以 NVID
以下是结合 2025 年最新技术参数、市场份额及应用场景的国产 AI 计算卡综合排名,分为训练、推理及边缘端三大类,并附核心厂商对比分析:一、训练场景综合排名1
*



 商城
商城




















































 试用申请
试用申请

 硬件产品咨询
硬件产品咨询

 在线客服
在线客服

 回到顶部
回到顶部