
人流统计AI算法通过3D空间建模、多目标跟踪(MOT)、行人重识别(Re‑ID)、时序轨迹校验、方向判定与深度特征融合等技术,系统性解决重复计数、逆行、遮挡三大核心难题,主流方案精度可达98%–99%+。

一、重复计数:从“帧间匹配”到“全局身份唯一”
核心思路:为每个行人分配唯一、稳定的匿名ID,通过时空+外观双重校验避免同一人被多次计数。
1. 多目标跟踪(MOT)+ 轨迹生命周期管理
基础框架:YOLOv8/YOLOv5 检测 + DeepSORT/ByteTrack 跟踪
为每个目标分配唯一ID,持续跟踪其在视频序列中的位置。
用卡尔曼滤波预测下一帧位置,用匈牙利算法做帧间最优匹配。
轨迹去重逻辑
设定计数线/计数区域(如出入口虚拟线)。
仅当轨迹完整穿越计数线且方向一致时才计数;折返、徘徊不重复计。
轨迹短暂消失/遮挡后重现,通过外观+运动一致性续接ID,不生成新ID。
2. 行人重识别(Re‑ID):跨帧/跨镜身份锁定
提取人体高维特征向量(体型、步态、衣着纹理、头肩轮廓)。
用余弦相似度做跨帧/跨摄像头匹配,建立全局身份图谱。
公式示例(融合外观+运动):
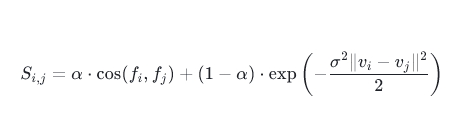
f:外观特征;v:运动向量;α:动态权重(随拥挤度自适应)。
3. 3D空间+时序双重校验
双目/多目深度图+点云,区分“同一人折返”与“不同人同向”。
记录进入/离开时间戳,在时间窗口内做唯一性校验。
二、逆行:精准判定“进/出”,双向分离计数
核心思路:三维方向判定+轨迹语义分析+计数规则绑定,区分正向/反向人流。
1. 三维运动方向建模
基于3D坐标计算行人运动向量($$x,y,z$$ 三维),而非仅2D像素方向。
设定基准方向(如“从室外到室内=进”),计算夹角阈值(如>120°判定为逆行)。
2. 轨迹语义与计数规则
对轨迹做方向聚类(进/出/徘徊)。
仅统计正向穿越计数线的目标;逆行单独统计或排除(按业务需求)。
处理折返/徘徊:短时间内往返不重复计入“进/出”,仅记为“驻留/经过”。
3. 多视角融合(复杂场景)
出入口部署多摄像头,做视角互补+方向投票,降低单视角误判。
三、遮挡:从“2D检测”到“3D分层+轮廓补全”
核心思路:深度感知分离重叠目标+多尺度特征+轨迹预测补全,解决密集/遮挡漏检。
1. 3D立体视觉(最有效方案)
双目/多目成像:生成深度图/点云,建立三维空间边界。
即使肢体重叠,也能通过深度差异区分不同个体,实现“物理分离”。
过滤非人体障碍物(购物车、柱子、行李)。
2. 多尺度/自适应检测网络
采用多尺度感受野:高密度场景自动扩大感受野,捕捉局部与全局轮廓。
用头肩检测(比全身更稳定、抗遮挡)作为核心特征。
结合人体关键点/姿态估计,补全被遮挡的肢体信息。
3. 轨迹预测与遮挡续接
遮挡期间用卡尔曼滤波预测轨迹,不轻易删除ID。
重现后通过Re‑ID特征+运动一致性快速匹配原ID,避免ID跳变。
四、主流算法方案对比(选型参考)
方案 | 核心技术 | 重复计数 | 逆行 | 遮挡 | 精度 | 适用场景 |
2D+MOT | YOLO+DeepSORT | 中 | 中 | 差 | 90%–95% | 低密、光线好 |
3D双目+AI | 深度图+Re ID+MOT | 优 | 优 | 优 | 98%–99%+ | 高密、出入口、复杂光照 |
多模态融合 | RGB+深度+时序Transformer | 极优 | 极优 | 极优 | 99%+ | 超复杂、超大流量 |
五、工程落地关键优化
1. 计数线/区域设计
出入口设斜向/分段计数线,减少并行遮挡影响。
用双向独立计数线分别统计“进”与“出”。
2. 动态参数自适应
实时估计人群密度,动态调整匹配阈值、感受野、轨迹置信度。
3. 后处理校验
对短轨迹、异常速度、频繁折返做过滤与校正。
多摄像头全局去重,避免跨镜重复统计。
六、总结
重复计数:靠Re‑ID+MOT+3D时空校验实现ID唯一。
逆行:靠三维方向判定+轨迹语义+计数规则精准分离。
遮挡:靠双目深度+多尺度检测+轨迹预测实现目标分离与续接。
主流3D双目+AI方案在商场、景区、交通枢纽等复杂场景可稳定达到99%左右的计数精度。
请用手机扫码查看分享内容
 需求留言:
需求留言:
领先的边缘智能产品与解决方案提供商






华北地区负责人:17340067106(毛经理)
华东地区负责人:17358670739(甘经理)
华南、华西地区负责人:19113907060(耿女士)
软件算法咨询:18982151213(刘先生)
四川省成都市武侯区天府五街花漾锦江JR大厦B座7层(总部)
 试用申请
试用申请

 硬件设备咨询
软件算法咨询
硬件设备咨询
软件算法咨询

 在线客服
在线客服

 回到顶部
回到顶部





 商城
商城


















